

Bionic tension and compression body two degrees of freedom mechanical wrist
A degree of freedom and mechanical wrist technology, applied in the field of bionic robots, can solve the problems of motion and flexibility of human wrists, achieve high safety, and improve the effect of output torque and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
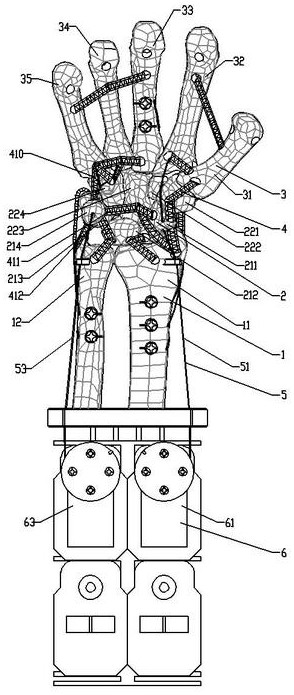
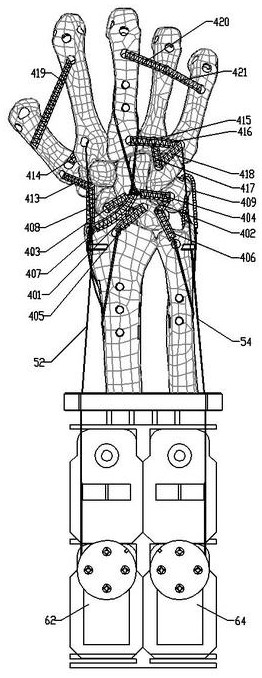
[0025] Such as figure 1 , figure 2 and image 3 As shown, a bionic tension-compression two-degree-of-freedom mechanical wrist is composed of a distal arm 1, a wrist 2 and a palm 3, wherein the bones are connected by ligaments 4 and driven by a motor 6 through tendons 5;
[0026] Described tendon 5 comprises radial side flexor tendon 51, radial side extensor tendon 52, ulnar side flexor tendon (53) and ulnar side extensor tendon 54;
[0027] Described motor 6 comprises first motor 61, second motor 62, the 3rd motor 63 and the 4th motor 64:
[0028] The distal arm 1 includes the distal portion of the radius 11 and the ulna 12, the distal radial joint of which is fused and fixed;
[0029] Described wrist 2 is made up of near row carpal bone 21 and far row carpal bone 22; Near row carpal bone 21 comprises scaphoid bone 211, lunate bone 212, triangular bone 213 and lentiform bone 214; Far row carpal bone 22 comprises trapezoid bone 221, Small trapezium 222, capitate bone 223, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More