

Method for identifying depth of foundation pit based on multiple cameras
A multi-camera and camera technology, applied in image analysis, image enhancement, image data processing, etc., can solve the problems of increased project cost, difficulty in ensuring the accuracy and real-time of identification data, and reduce personnel input and avoid cross-operation. , to ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
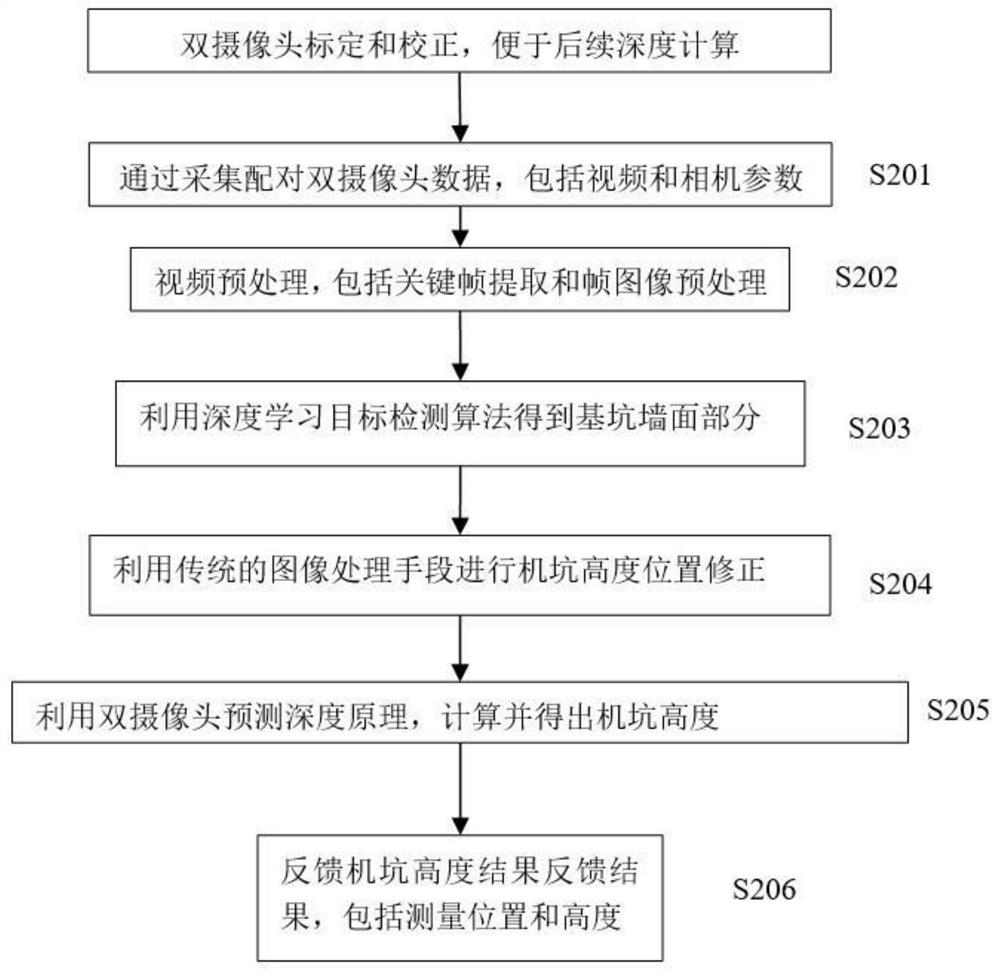
[0038] Such as figure 1 As shown, a method for identifying the depth of a foundation pit based on multiple cameras includes the following steps:
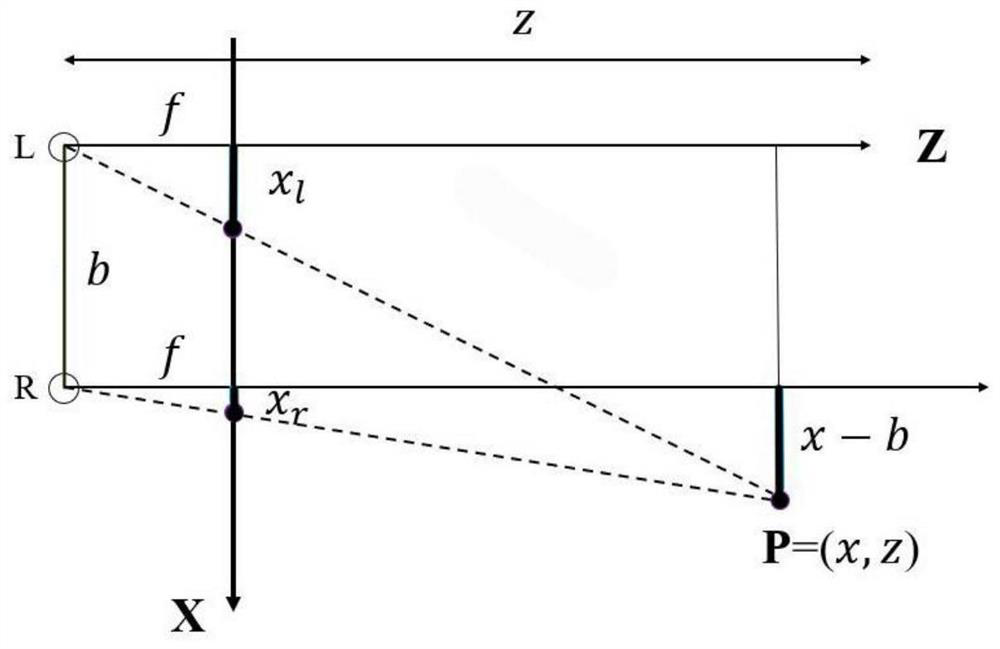
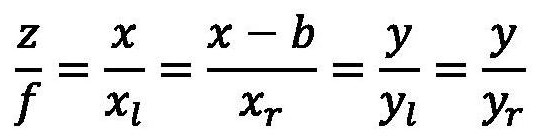
[0039] S201: Collect and obtain the paired dual-camera data, including camera position parameters, including the focal length f of the camera and the reference distance b between the dual-cameras, and perform camera video and dual-camera calibration correction to ensure the image plane of the dual-camera coincide, making the subsequent depth estimation accurate;
[0040] S202: Preprocessing the acquired video data, including extracting key frames and frame image preprocessing, the goal is to extract frame images for depth estimation from the video data;
[0041] S203: Use the trained deep semantic Faster RCNN to segment the network, segment and obtain the part of the machine pit, and initially obtain the part of the depth of the machine pit that needs to be measured;
[0042] S204: Use the edge detection algorithm image processing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More