Three-axis unmanned vehicle and comprehensive vehicle control system, and obstacle crossing method thereof
A technology of unmanned vehicles and lifting systems, applied in the direction of motor vehicles, vehicle components, suspensions, etc., can solve problems such as instability, affecting the balance of unmanned vehicles, and inability to realize functions, so as to meet the needs of smooth trench crossing and improve field performance. The effect of road adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings. As a limitation of the present invention.
[0072] As the first embodiment of the present invention, the present invention discloses a comprehensive vehicle control system for three-axis unmanned vehicles. The integrated vehicle control system for three-axis unmanned vehicles is suitable for unmanned vehicles with Fields such as terrain or military reconnaissance, environmental monitoring, and penetration attacks have the technical characteristics of good stability, fast response, safety and reliability.
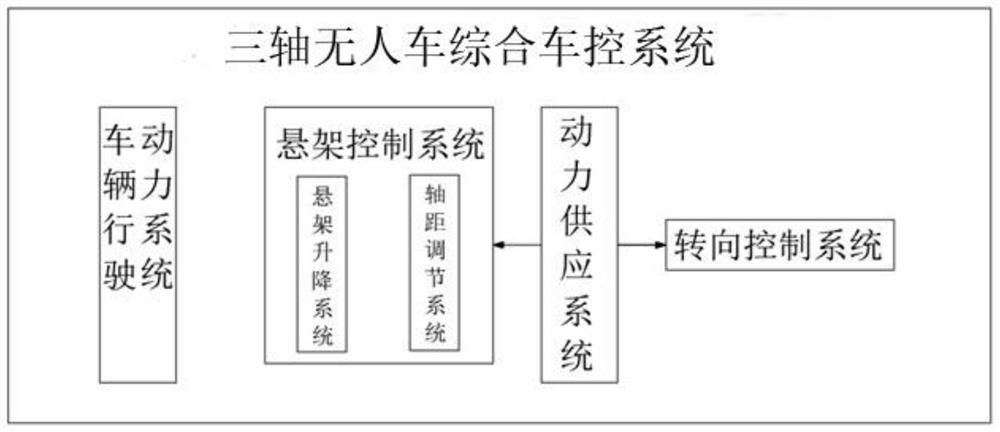
[0073] Such as figure 1 As shown, the comprehensive vehicle control system of the three-axis unmanned vehicle specifically includes four parts: the suspension control system, the steering control system, the power supply system and the vehicle driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More