

Obstacle avoidance control method and device, vehicle and storage medium
A control method and obstacle avoidance technology, applied in vehicle components, transportation and packaging, steering mechanisms, etc., can solve problems such as increasing difficulty in online optimization and solving, increasing complexity of control problems, and difficulty in ensuring real-time solving, etc. The number of constraints, reducing the amount of calculation, and improving the effect of real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
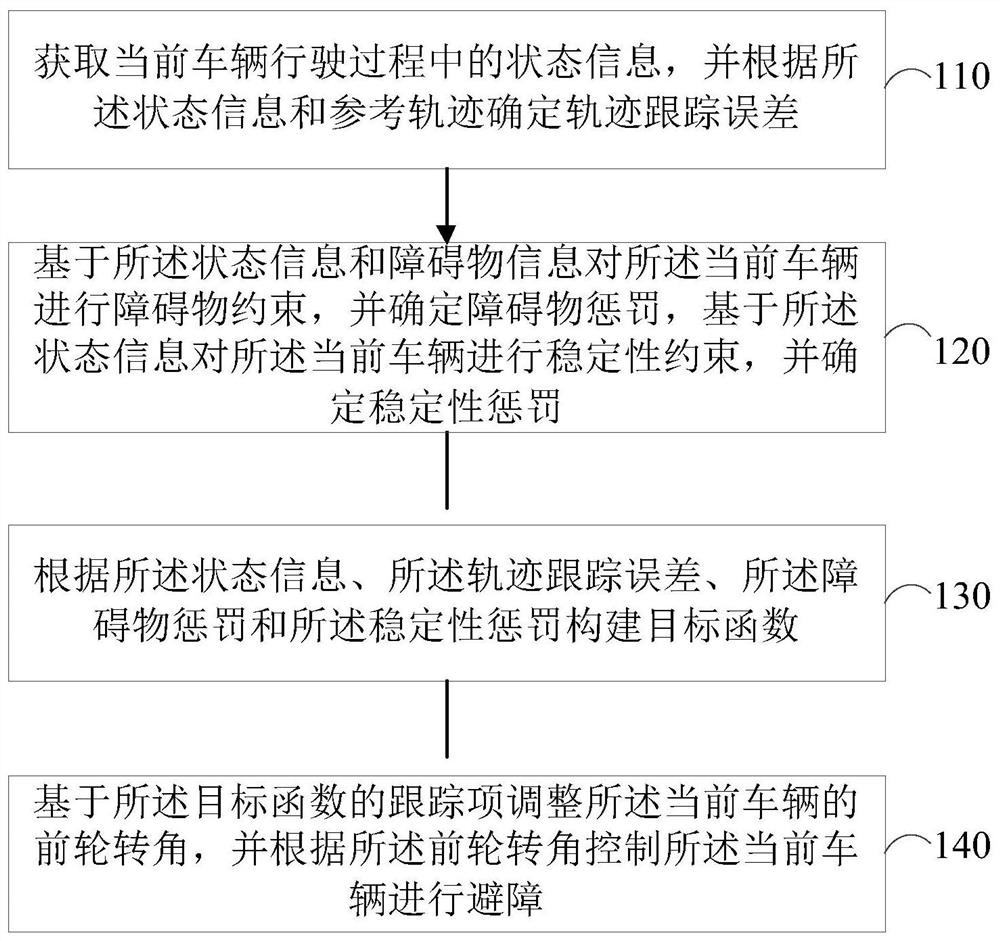
[0071] figure 1 It is a flow chart of an obstacle avoidance control method provided by Embodiment 1 of the present invention, and this embodiment of the present invention is applicable to the situation of performing obstacle avoidance control in a dynamic traffic scene. The method can be executed by an obstacle avoidance control device, and the device can be realized by software and / or hardware. Optionally, the obstacle avoidance control device can be configured in a vehicle. Such as figure 1 Said, the method specifically includes the following steps:
[0072] Step 110: Acquiring state information during the current driving process of the vehicle, and determining a trajectory tracking error according to the state information and a reference trajectory.
[0073] Wherein, the state information may include the running trajectory of the current vehicle, and the reference trajectory may be a pre-stored predicted trajectory of the vehicle.
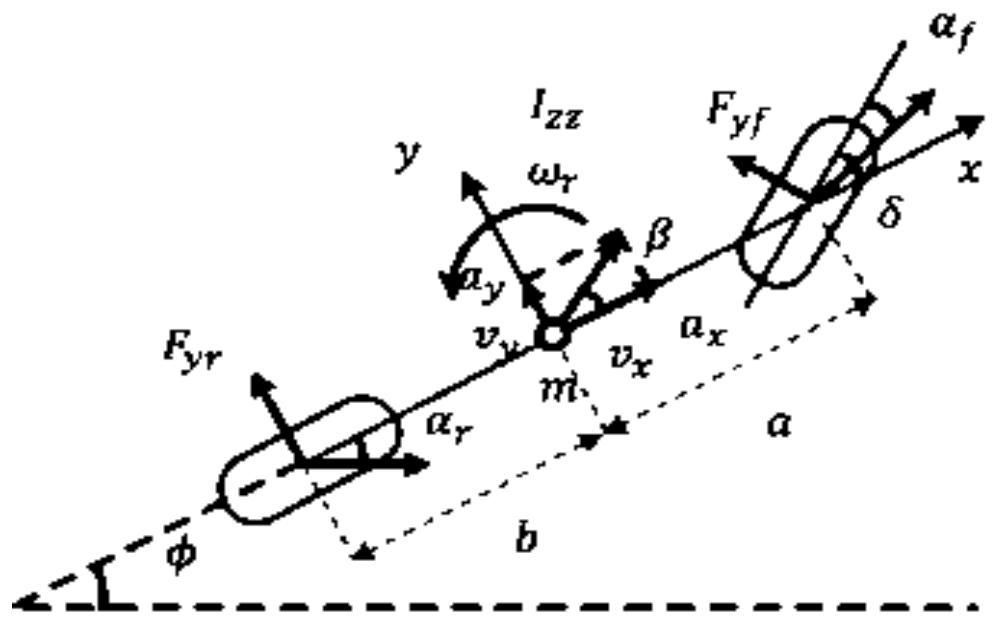
[0074] In the vehicle coordinate syst...
Embodiment 2
[0097] Figure 4 It is a flowchart of an obstacle avoidance control method provided by Embodiment 2 of the present invention, and this embodiment of the present invention is applicable to the situation of performing obstacle avoidance control in a dynamic traffic scene. The embodiments of the present invention are embodied on the basis of the foregoing embodiments, and explanations of terms that are the same as or corresponding to the foregoing embodiments will not be repeated here. see Figure 4 , an obstacle avoidance control method provided by an embodiment of the present invention includes:
[0098] Step 410: Acquiring state information during the current driving process of the vehicle, and determining a trajectory tracking error according to the state information and a reference trajectory.
[0099] In one embodiment, the state information includes the running trajectory of the current vehicle, and accordingly, determining the trajectory tracking error according to the ...
Embodiment 3
[0142] Figure 11 It is a schematic structural diagram of an obstacle avoidance control device provided by Embodiment 3 of the present invention. The device and the obstacle avoidance control method of the above-mentioned embodiments belong to the same inventive concept. For details not described in detail in the embodiments of the obstacle avoidance control device, reference can be made to the above-mentioned embodiment of the obstacle avoidance control method.
[0143] The specific structure of the obstacle avoidance control device is as follows: Figure 11 shown, including:
[0144] An acquisition module 1110, configured to acquire state information during current vehicle driving, and determine a trajectory tracking error according to the state information and a reference trajectory;
[0145] A determining module 1120, configured to perform obstacle constraints on the current vehicle based on the state information and obstacle information, and determine obstacle penalties...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More