

Position look-ahead self-adaptive puncture control method
A control method and self-adaptive technology, applied in the direction of self-adaptive control, puncture needle, general control system, etc., can solve problems such as patient injury, achieve the effect of reducing wounds, reducing the requirements of clinical experience, and solving the problem of execution overshoot and lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
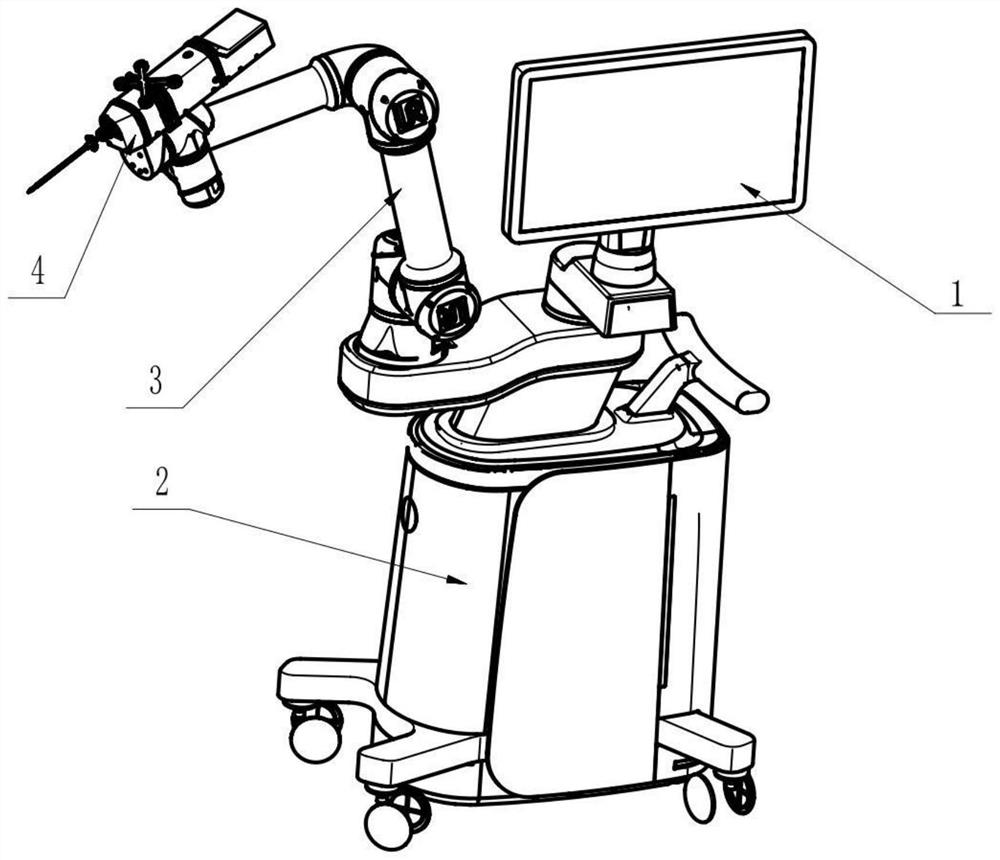
[0085] figure 1 Composition diagram for the existing robotic trolley with automatic puncture, such as figure 1 As shown, the robot trolley includes a display 1, a robot trolley body 2, a robot arm 3 and an automatic puncture system 4, wherein the robot arm 3 and the display 1 are installed on the robot trolley body 2, and the automatic puncture system 4 is installed on the robot arm 3 on the terminal joint.
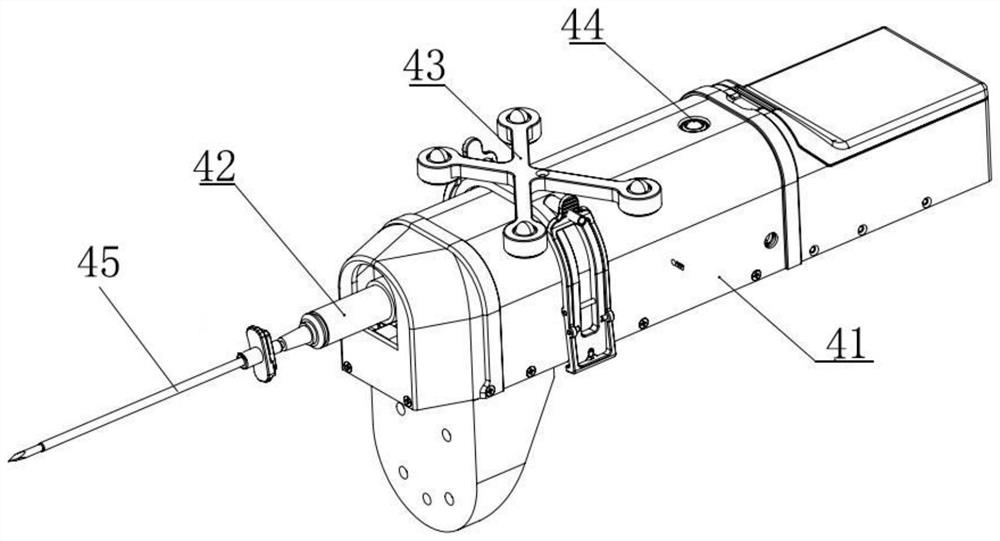
[0086] figure 2 It is the structural diagram of the existing automatic puncture system, such as figure 2 As shown, the automatic puncture system 4 includes a body 41, a drill bone assembly 42, a tracer assembly 43, an indicator light 44, and a puncture device 45, wherein the body 41 is fixedly installed on the end joint of the mechanical arm 3, and a drill bone is arranged therein. Motor; the bone drill assembly 42 is installed on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More