

Laser navigation unmanned trolley for intelligent logistics and navigation method thereof
A laser navigation and unmanned car technology, applied in two-dimensional position/channel control, motor vehicles, vehicle position/route/height control, etc., can solve the problems of car navigation accuracy decline, car adaptability reduction, navigation interruption, etc. , to achieve the effect of improving environmental adaptability, reliable navigation, and avoiding the decline or even interruption of navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
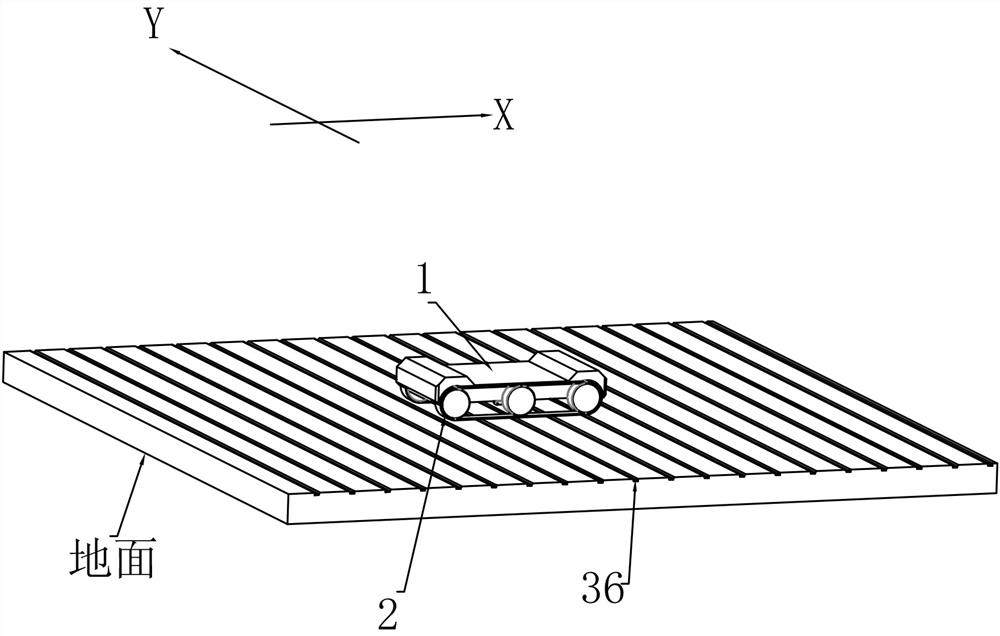
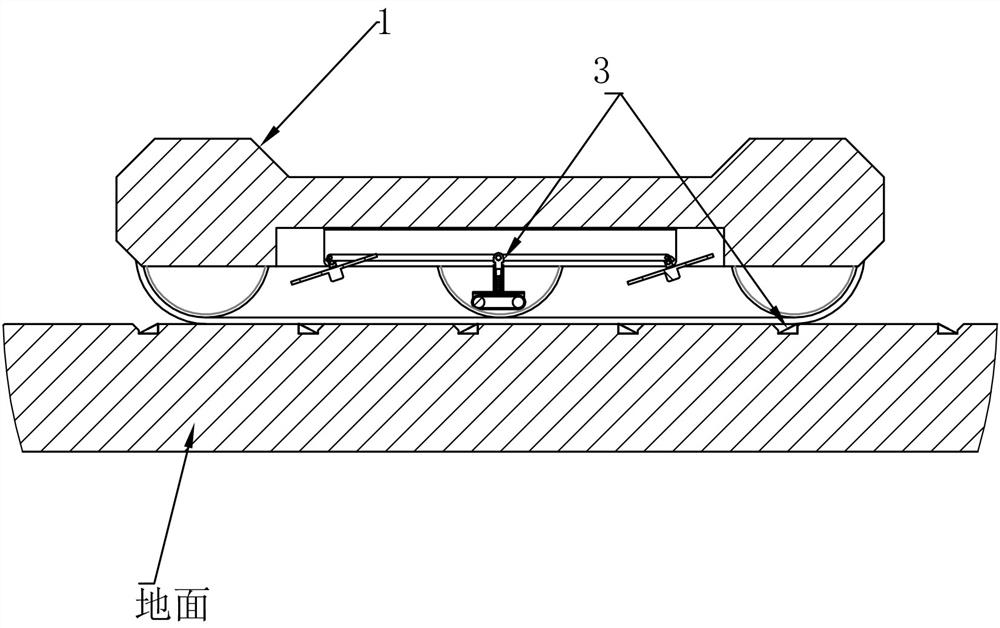
[0023] Such as Figure 1 to Figure 7 As shown, a laser navigation unmanned car for intelligent logistics described in this embodiment includes a car body 1, a walking mechanism 2 arranged on the car body 1 and used to drive the car body 1 to move, and a 1 providing laser navigation mechanism 3 for navigation;
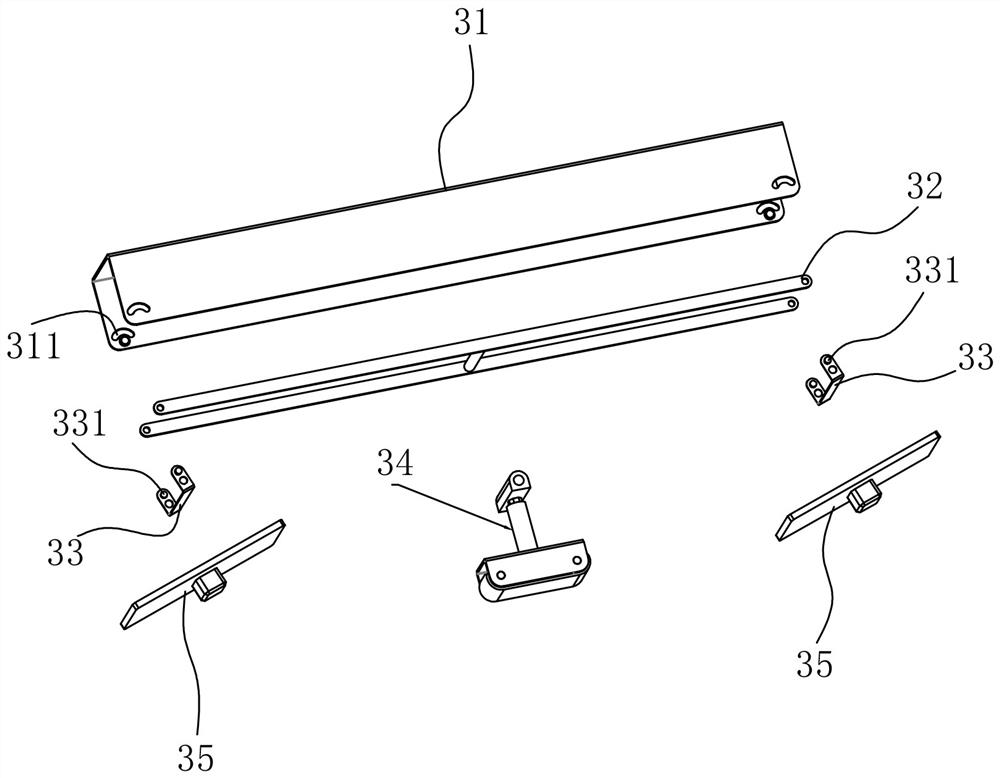
[0024] The laser navigation mechanism 3 includes a first bracket 31, an H-shaped connecting rod 32, two yaw brackets 33, an elastic yaw drive assembly 34 and two laser transceivers 35, and the top of the first bracket 31 is fixed on the vehicle. The bottom of the body 1, the H-shaped connecting rod 32 is arranged on the first bracket 31, the two yaw brackets 33 are arranged at intervals and respectively hinged on the first bracket 31, each of the yaw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More