

Unmanned aerial vehicle emergency processing method and system, storage medium and electronic equipment
An emergency treatment and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of casualties, inaccuracy, unsafe statistics, etc., achieve the effects of improving efficiency and accuracy, avoiding double counting, and saving resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
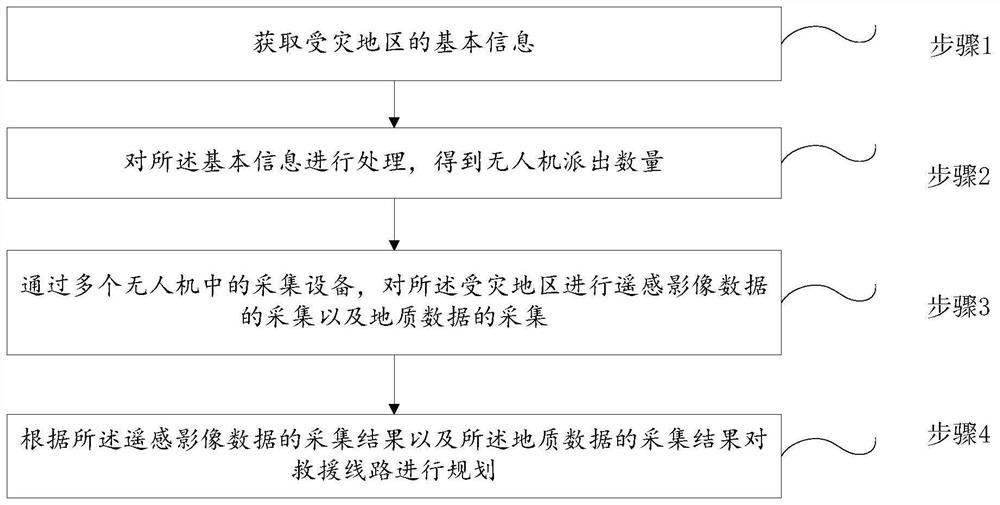
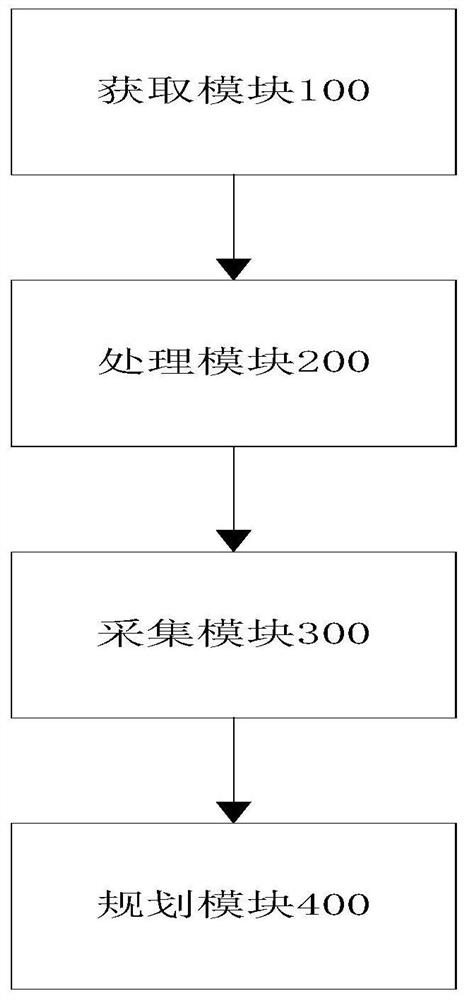
[0050] Embodiment 1. After receiving the request for support information, the rescue command center calls the processor to obtain basic information including the disaster location, disaster type, and disaster scope, and plans the disaster scope through the multi-factor maximum coverage model to obtain the unmanned personnel that need to be dispatched. The number of drones is controlled. After the drones arrive at their designated locations, the drones will collect data from the disaster-stricken area through their own collection equipment, including remote sensing image data and geological data. The collected data is input into the pre-established prediction model to obtain the data information of the road sections with risks in the disaster-stricken area, and after integrating the data information of the road sections with risks, a safe and shortest rescue path that avoids the risky sections is obtained.
[0051] Preferably, in any of the above-mentioned embodiments, the basic...
Embodiment 2
[0060] Embodiment 2, after receiving the request for support information, the rescue command center invokes the processor to obtain basic information including the disaster location, disaster type, and disaster scope, and plans the disaster scope through the multi-factor maximum coverage model to obtain the unmanned personnel that need to be dispatched. The number of drones is controlled. After the drones arrive at their designated locations, the drones will collect data from the disaster-stricken area through their own collection equipment, including remote sensing image data and geological data. Input the collected data into the pre-established prediction model to obtain the data information of the road sections with risks in the disaster-affected area. After integrating the data information of the road sections with risks, input them into the pre-established optimal path generation model to obtain the optimal route generation model. The optimal path will be sent to the rescu...
Embodiment 3
[0064] Embodiment 3, after receiving the request for support information, the rescue command center invokes the processor to obtain basic information including the disaster location, disaster type, and disaster scope, and plans the disaster scope through the multi-factor maximum coverage model to obtain the unmanned personnel that need to be dispatched. The number of drones is controlled. After the drones arrive at their designated locations, the drones will collect data from the disaster-stricken area through their own collection equipment, including remote sensing image data and geological data. Input the collected data into the pre-established prediction model to obtain the data information of the road sections with risks in the disaster-affected area. After integrating the data information of the road sections with risks, input them into the pre-established optimal path generation model to obtain the first The optimal path, and send the first optimal path to the rescue comm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More