

Multi-unmanned aerial vehicle sliding mode formation control method based on median deviation
A technology of multiple drones and control methods, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., to achieve the effects of improving synchronization performance, avoiding response lag, and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
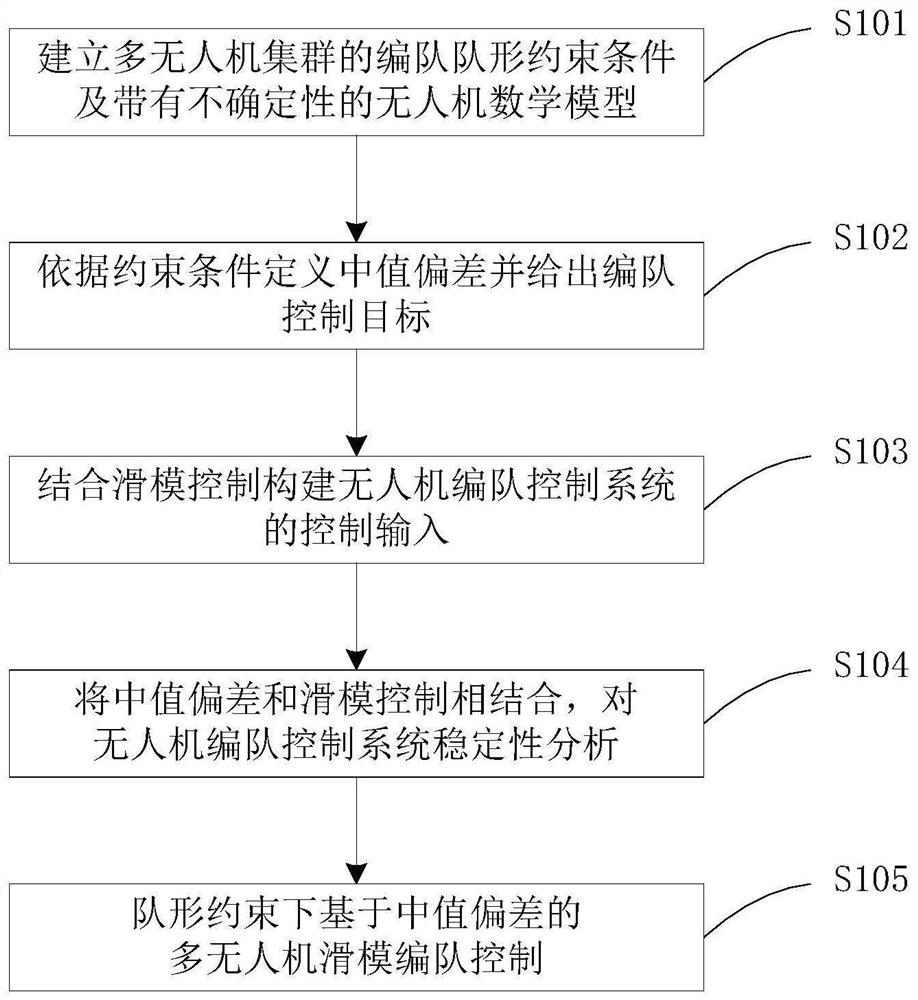
[0069] Embodiment 1, a flow diagram of a multi-UAV sliding mode formation control method based on the median deviation, such as figure 1 As shown, the implementation process of a multi-UAV sliding mode formation control method based on the median deviation of the present invention includes the following steps:
[0070] Step S101 The formation constraints of the multi-UAV cluster and the UAV model with uncertainty include:
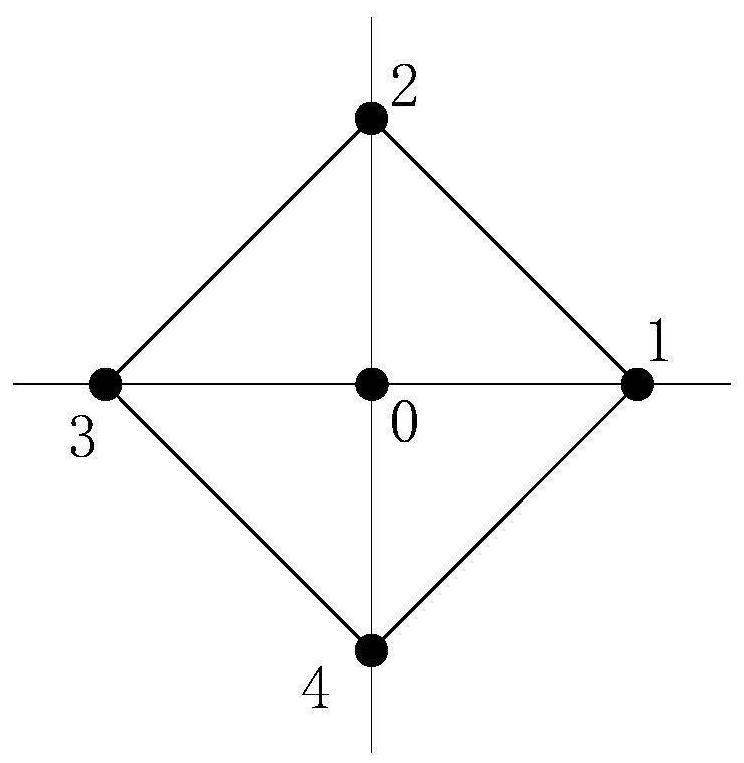
[0071] 1) In order to better illustrate the synchronization of UAVs, the formation constraints of UAV formations are described below. The formation constraint formation is described by the general ellipsoid equation, and the parameter equation is as follows:
[0072]
[0073] In the formula, Q i Represents the position of UAV i, i∈1,2,3,...,n; (x 0 ,y 0 ,z 0 ) is the center point of the ellipsoid; a, b, c (a>0, b>0, c>0) are respectively the major semi-axis, middle semi-axis and minor semi-axis of the ellipsoid according to their size; (x i ,y i ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More