

Architecture and tracking control method of an intelligent vehicle automatic driving system in a park
An intelligent vehicle and autonomous driving technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system and other directions, can solve problems such as poor satellite positioning signal and maximum power supply constraints of automatic driving system equipment, etc. Reliable and precise positioning and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
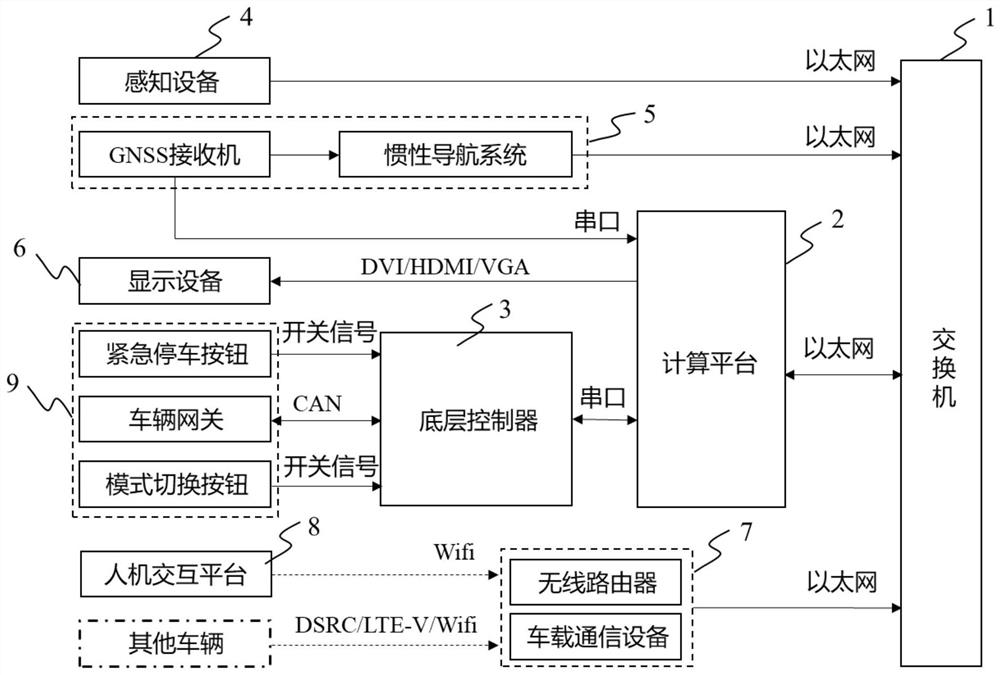
[0080] Such as figure 1 , figure 2 with Image 6As shown, the campus intelligent vehicle automatic driving system architecture provided by the embodiment of the present invention includes a switch 1 , a computing platform 2 , a bottom controller 3 , a sensing device 4 , a positioning device 5 , a communication device 7 and a human-computer interaction platform 8 . The sensing device 4 and the positioning device 5 transmit information to the computing platform 2 through the switch 1 . The human-computer interaction platform 8 transmits information to the computing platform 2 through the communication device 7 . The switch 1 exchanges information with the computing platform 2, and the bottom controller 3 interacts with the computing platform 2 through a serial port connection. All computing platforms 2 , sensing devices 4 , positioning devices 5 , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More