

Multi-view vision calibration method, device and system based on workpiece hole center, and medium
A multi-eye vision and workpiece hole technology, which is applied in the field of multi-eye vision calibration, can solve the problems of inconvenient measurement, inability to achieve high measurement accuracy, and low generalization of workpiece measurement, so as to improve generalization and detection accuracy. , the effect of convenient measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Embodiments of the present invention are described in detail below, and the embodiments described with reference to the drawings are exemplary, and embodiments of the present invention are described in detail below.
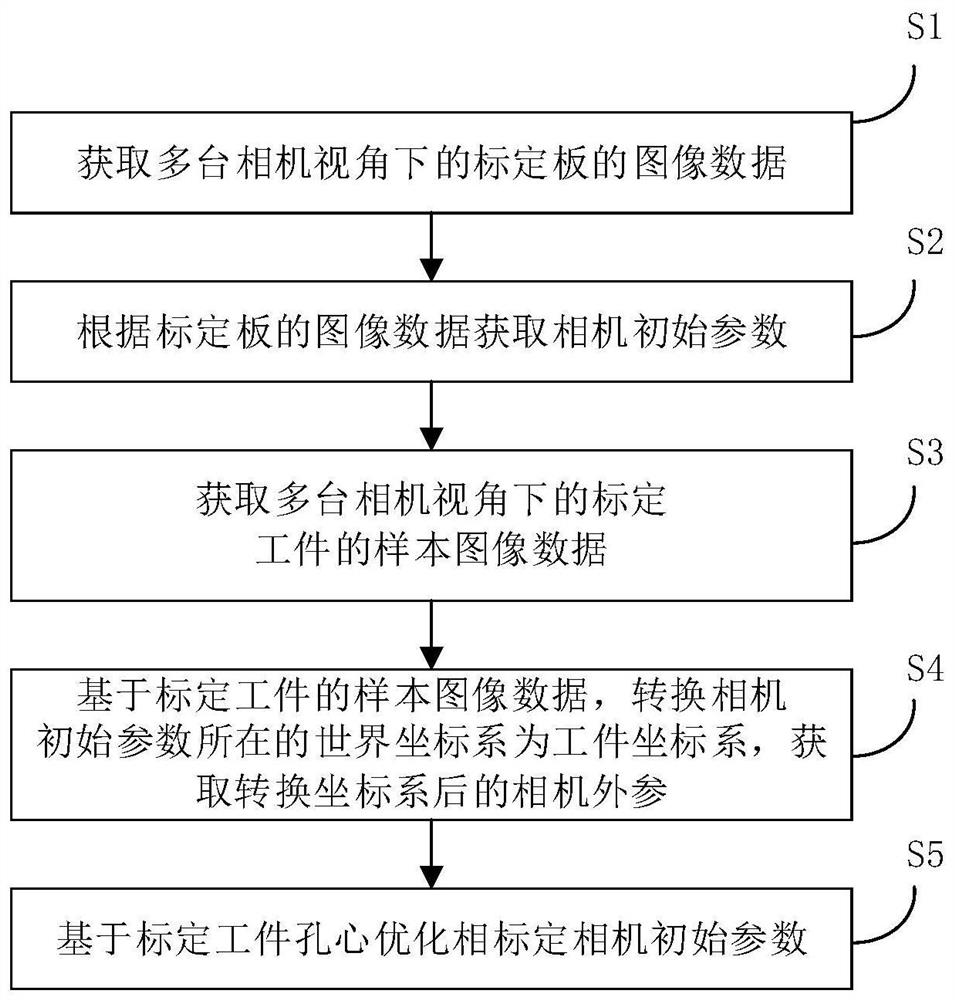
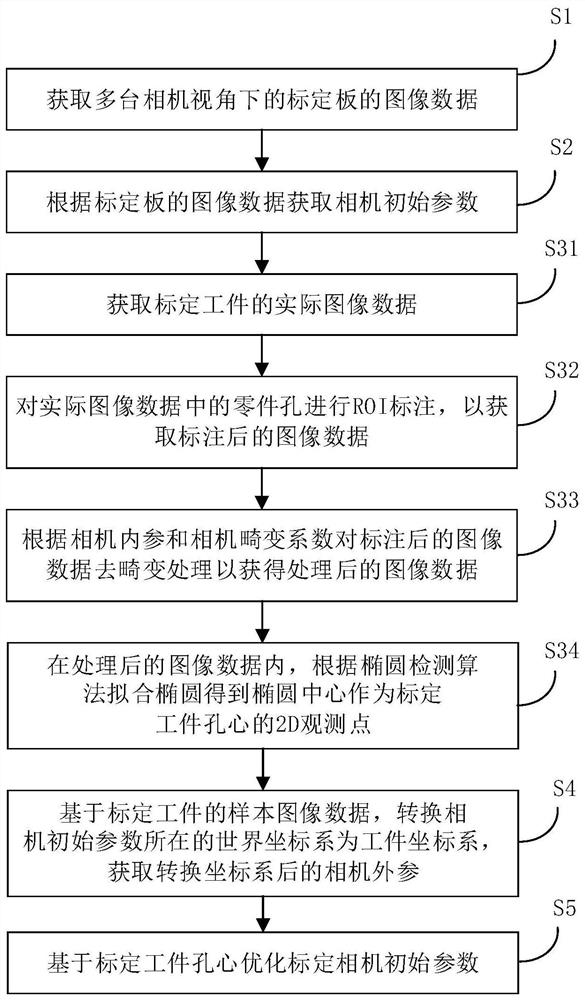
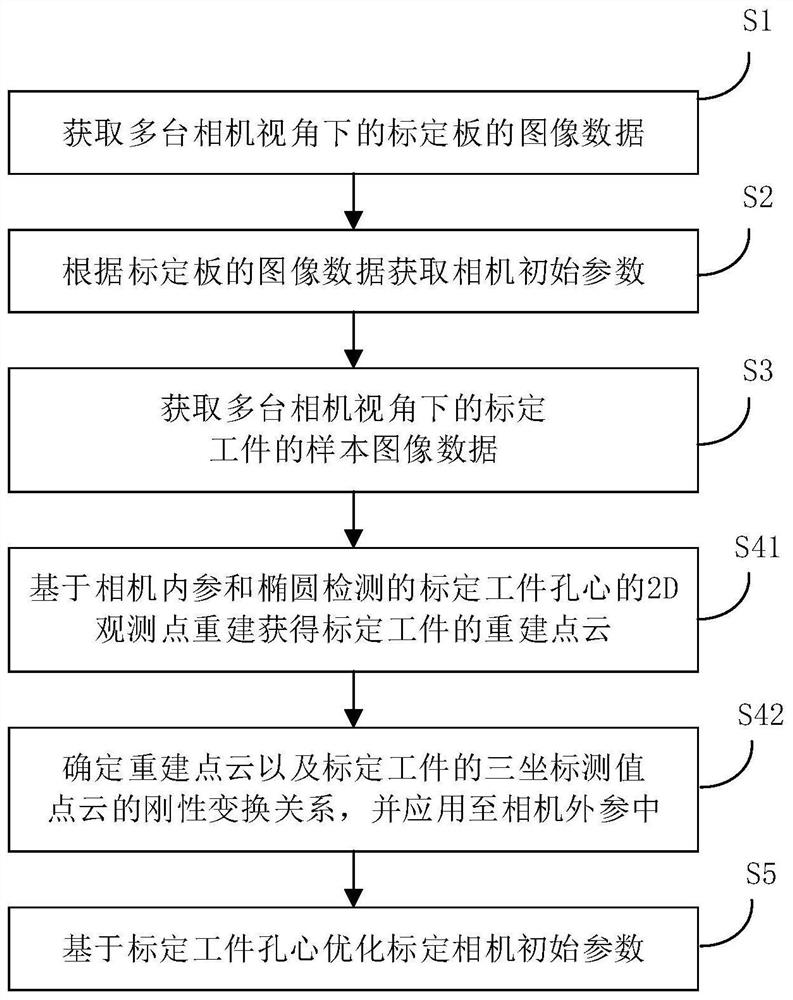
[0036] In order to solve the above problems, the embodiment of the first aspect of the present invention proposes a multi-objective vision calibration method based on the center of the workpiece hole, the following reference Figure 1-Figure 5 Describe the method for multi-objective vision calibration based on the workpiece hole center proposed by the embodiment of the present invention, such as figure 1 Shown is a flow chart of a method for multi-eye vision calibration based on workpiece hole center according to an embodiment of the present invention, wherein the method includes at least step S1-step S5, specifically as follows.
[0037]S1, acquiring the image data of the calibration board under the perspectives of multiple cameras.
[0038] In an embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More