

Self-adaptive unmanned trolley simulation method based on Datalog rule
A technology of unmanned car and simulation method, which is applied in the field of unmanned system simulation, can solve the problems of complicated system code and low execution efficiency, and achieve the effect of reducing complexity, reducing coupling and reducing the amount of system code
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0036] The present invention has designed a kind of self-adaptive unmanned car simulation method based on Datalog rule, and specific content is as follows:
[0037] 1. Establish a dynamically changing simulation scenario based on Datalog rules
[0038] S1.1: In the simulation scene, classify and model many elements in common operations, mainly including unmanned vehicles, road surfaces with different road conditions, obstacles, etc.
[0039] The specific method of step S1.1:
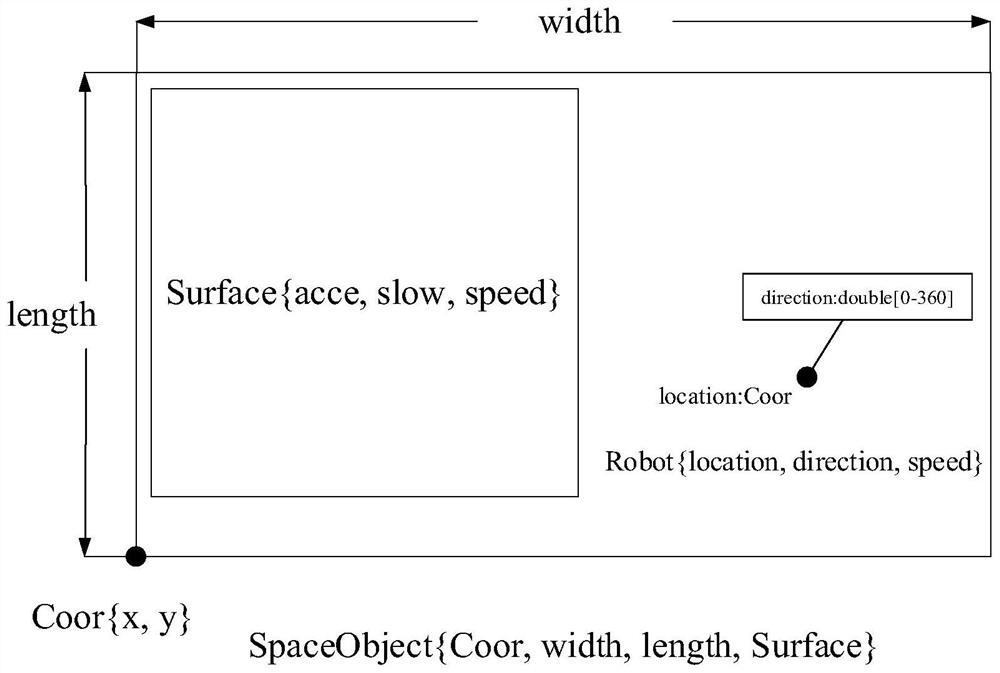
[0040] First, establish a data structure and extract the basic elements in the scene. Such as figure 1 As shown, the coordinate point Coor class is used to establish the position information in the scene, because the scene is two-dimensional, so the coordinate point is also two-dimensional, represented by x and y. The scene is composed of rectangular objects of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More