

Mobile robot predictive navigation method based on multi-target tracking
A multi-target tracking and mobile robot technology, applied in the field of mobile robot navigation and multi-target tracking, can solve the problems of frequent changes in navigation lines, achieve good interactivity, robustness, and simple environmental conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with specific embodiments.
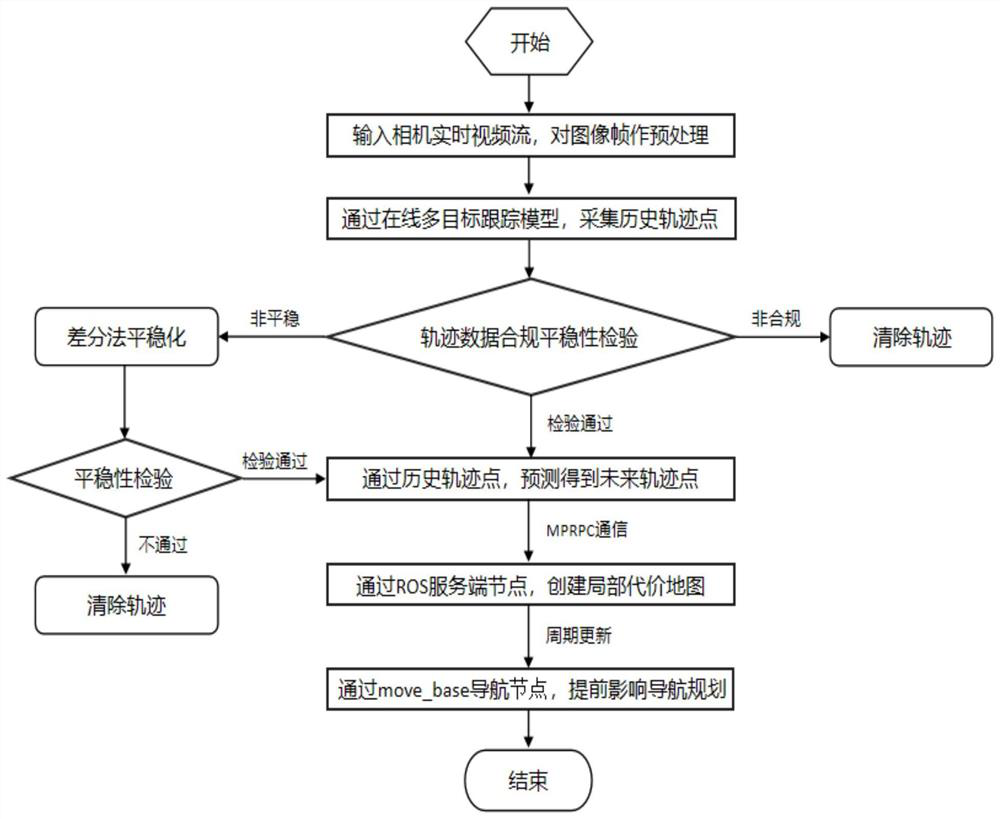
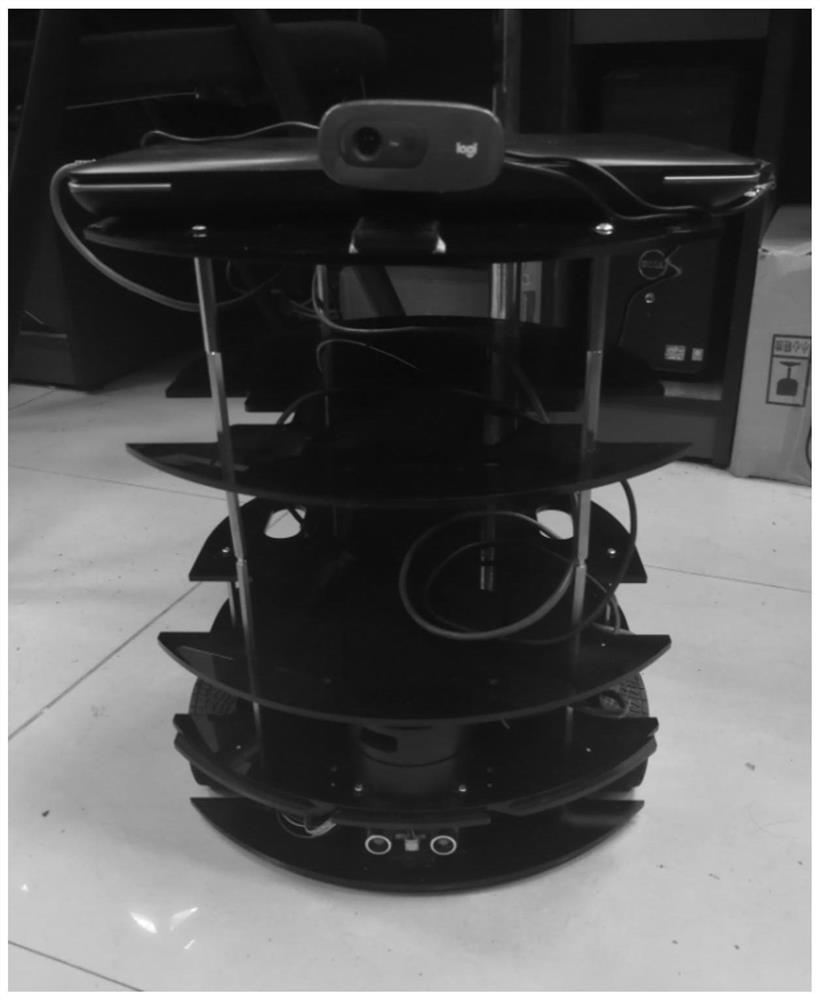
[0066] like figure 1 and figure 2 As shown, the predictive navigation method for a mobile robot based on multi-target tracking provided in this embodiment uses a server training platform, mobile robots, ASUS A456U notebook computers, Logit C270 CMOS cameras and other auxiliary equipment, which includes the following steps:
[0067] 1) Input the camera real-time video stream, and preprocess the image frame.
[0068] 1.1) Use the cv2.VideoCapture function in the opencv-python library to start the camera driver and obtain the CMOS camera video stream;
[0069] 1.2) Obtain the image frame in the video stream data, and preprocess the image frame: use the letterbox function in opencv-python to rescale the image on the premise of maintaining the aspect ratio of the image, and use the gray value for the remaining blank area. Fill it with 0 pixels. According to the resolution pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More