

Holographic intersection sensing method based on multi-source sensor
A source sensor and holographic technology, applied in the field of Internet of Vehicles, which can solve the problems of video sensor target occlusion, ability limitation, and insufficient perception ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
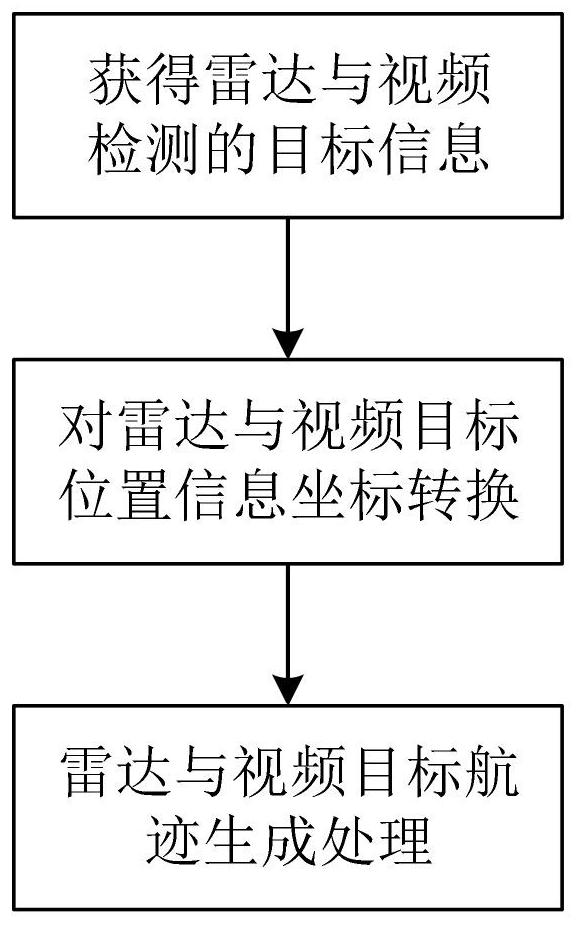
[0048] The present invention proposes a holographic intersection perception method based on multi-source sensors, the process is as follows figure 1 As shown, the steps are as follows:
[0049] Step 1. Obtain the target data Target detected by radar and video respectively at the same time r with Target v , the specific information is shown in the following table:
[0050]
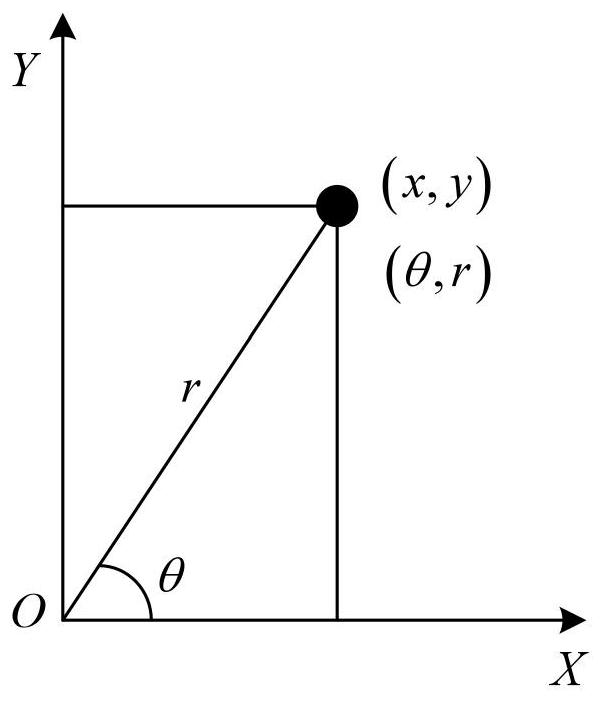
[0051] Step 2, the coordinate transformation of the radar target and the position information in the video target, specifically:
[0052] For the position information of the radar target, calculate the position in the radar Cartesian coordinate system (x r ,y r ),Such as figure 2 shown.
[0053] x r =r×cos(θ)
[0054] the y r =r×sin(θ)
[0055] For the position information of the video target, the position (u, v) of the pixel center of the target in the pixel coordinate system is transferred to the image coordinate system through the pixel coordinate system; the image coordinate system is tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More