

Quadrotor formation obstacle avoidance method based on cuckoo algorithm improved artificial potential field method
An artificial potential field method, quad-rotor technology, applied in the field of quad-rotor, can solve the problems of low convergence accuracy, many twists and turns, many nodes, etc., to simplify the calculation process, plan more paths, and reduce the number of iterations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
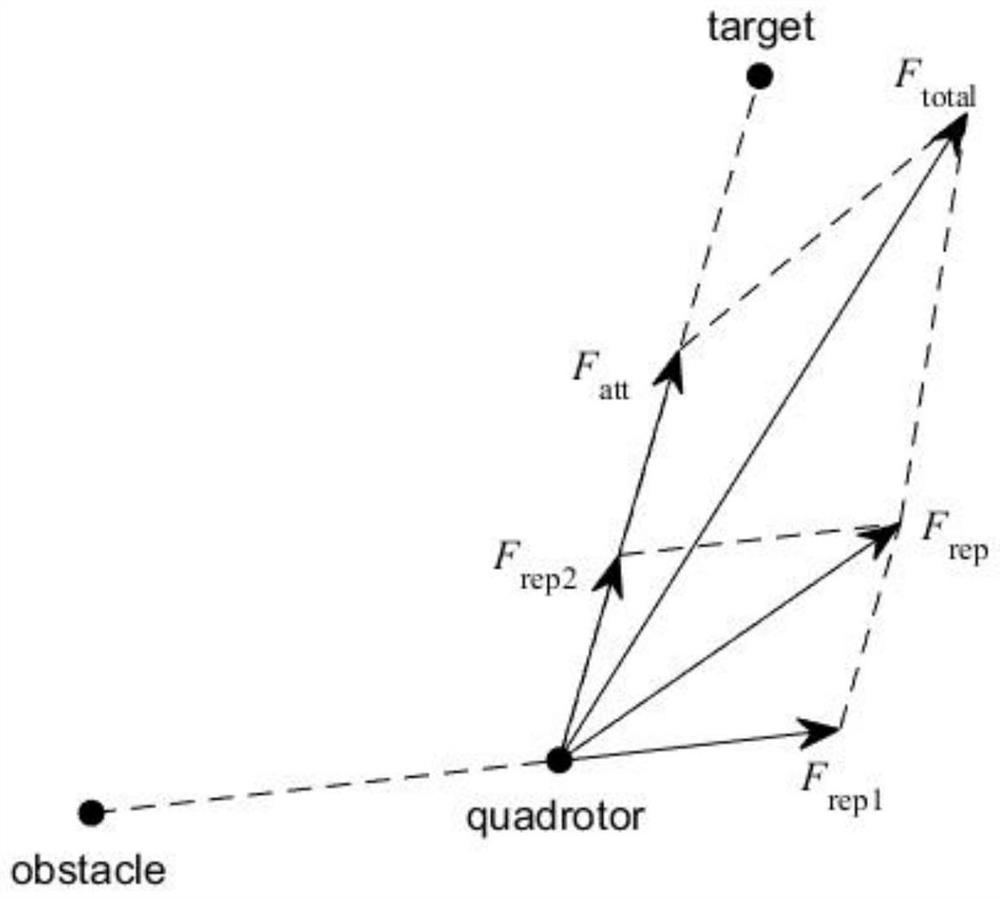
[0044] Depend on figure 1 As shown, the movement of the quadrotor in the environment is regarded as the movement under the action of the virtual force field, that is, the target point generates gravitational force on the quadrotor, guiding the quadrotor to move to the target point. objects collide. Attraction and repulsion work together to form a resultant force that controls the movement of the quadrotor. During the obstacle avoidance process of the four-rotor formation, the navigator generates a predetermined trajectory through the artificial potential field algorithm,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More