

Fixed-wing unmanned aerial vehicle cluster affine formation control method based on pilot following mode
A control method and unmanned aerial vehicle technology, applied in three-dimensional position/course control, non-electric variable control, control/adjustment system, etc., can solve the lack of fixed-wing unmanned aerial vehicle cluster formation control method, lack of flexibility, inapplicability Fixed-wing UAV cluster formation control and other issues, to achieve the effect of convenient application, good applicability, and easy adjustment of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
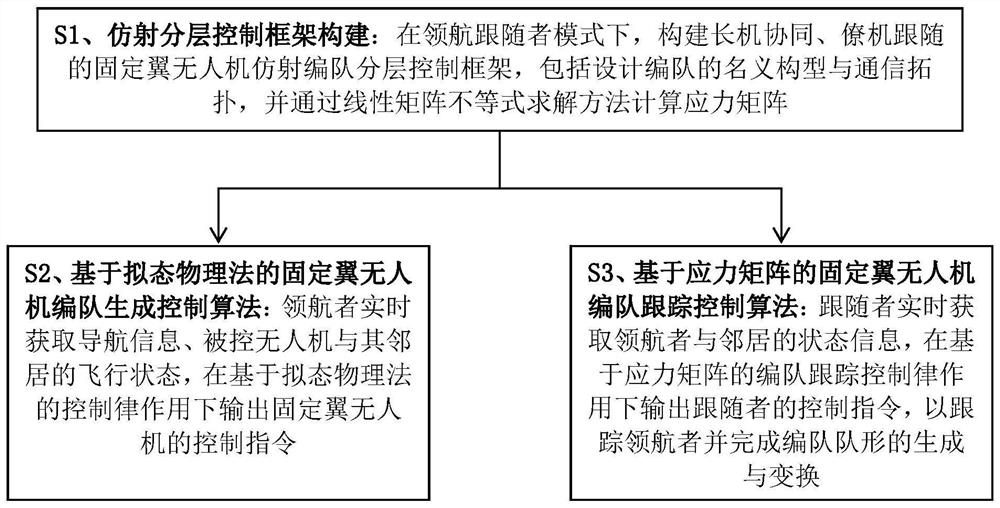
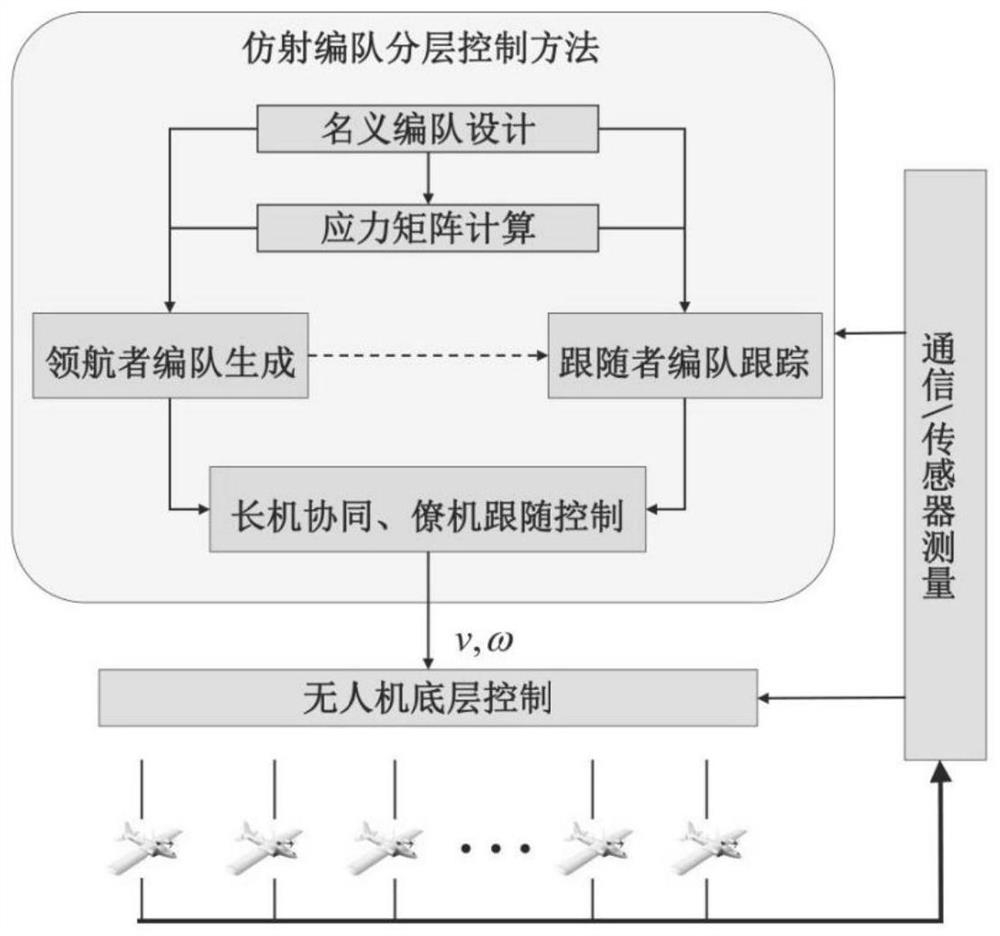
[0082] like figure 1 , 2 As shown, the steps of the fixed-wing unmanned aerial vehicle cluster affine formation control method based on the pilot following mode in this embodiment include:
[0083] S1. Construction of the affine hierarchical control framework: Based on the leader-follower model, determine the leader and follower in the fixed-wing UAV formation, and determine the configuration of the nominal formation and the communication topology of the cluster according to the mission requirements, and according to the communication Topology calculates the stress matrix of the nominal formation;
[0084] S2. Navigator formation generation: obtain the flight status of the leader in the fixed-wing UAV formation in real time, control the leader to move along th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More