

Visual system and method for synchronous positioning and mapping and mobile robot
A mobile robot and synchronous positioning technology, which is applied in the direction of control/adjustment system, instrument, non-electric variable control, etc., can solve the problems of the influence of the field of view and the inability to detect, etc., and achieve the effect of expanding the visual range and flexible installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
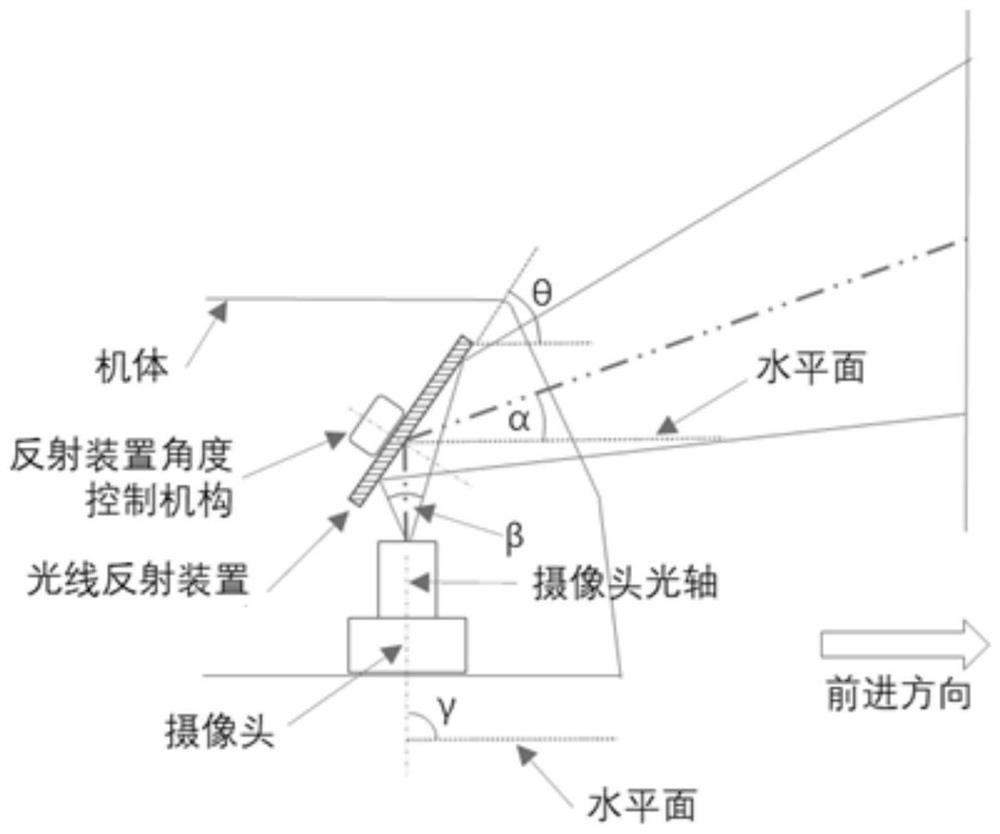
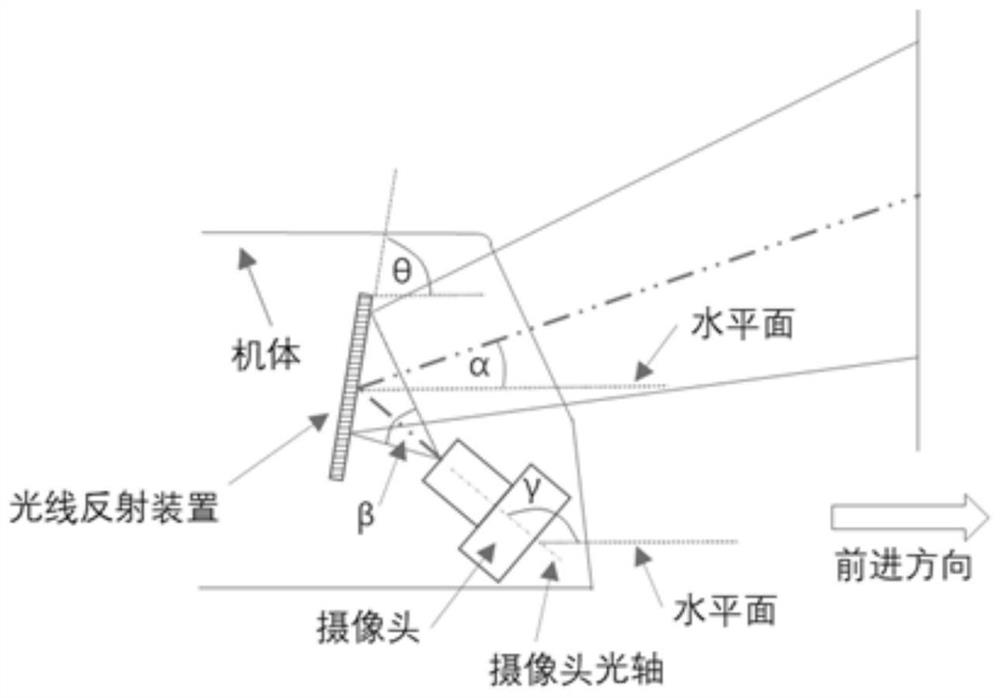
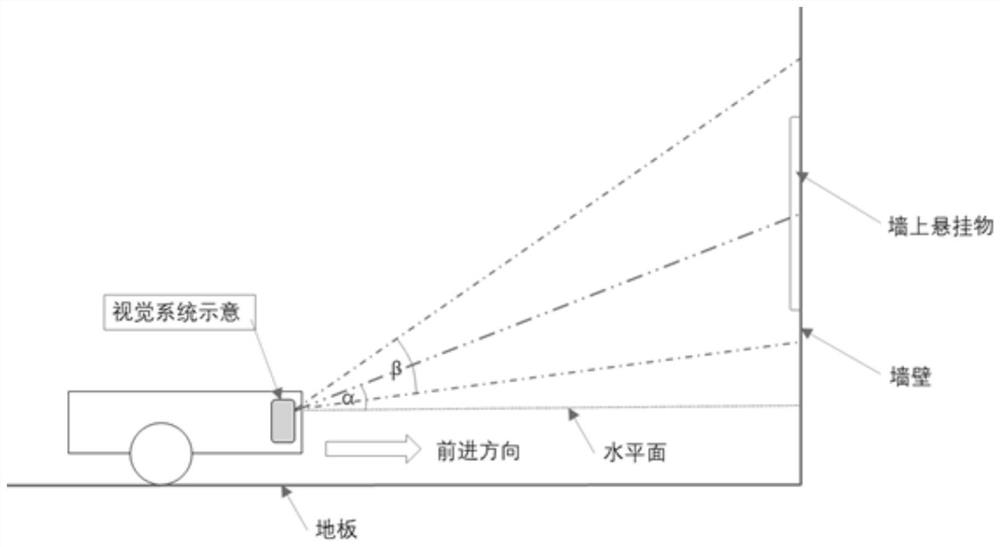
[0042] The invention provides a visual system for synchronous positioning and mapping, combining figure 1 , including a reflection device, a camera, a first control mechanism, a second control mechanism and a processor.
[0043] The camera collects visual information of the external environment through the reflection device to form an image.
[0044] The second control mechanism can adjust the angle of the camera. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More