

Fire-fighting and fire-extinguishing reconnaissance robot for hazardous chemical space
A robot and fire-fighting technology, applied in current collectors, fire rescue, color TV parts, etc., can solve the problems of increasing device weight, increasing device volume, affecting the stability of the cloud platform, etc., and achieve the effect of improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
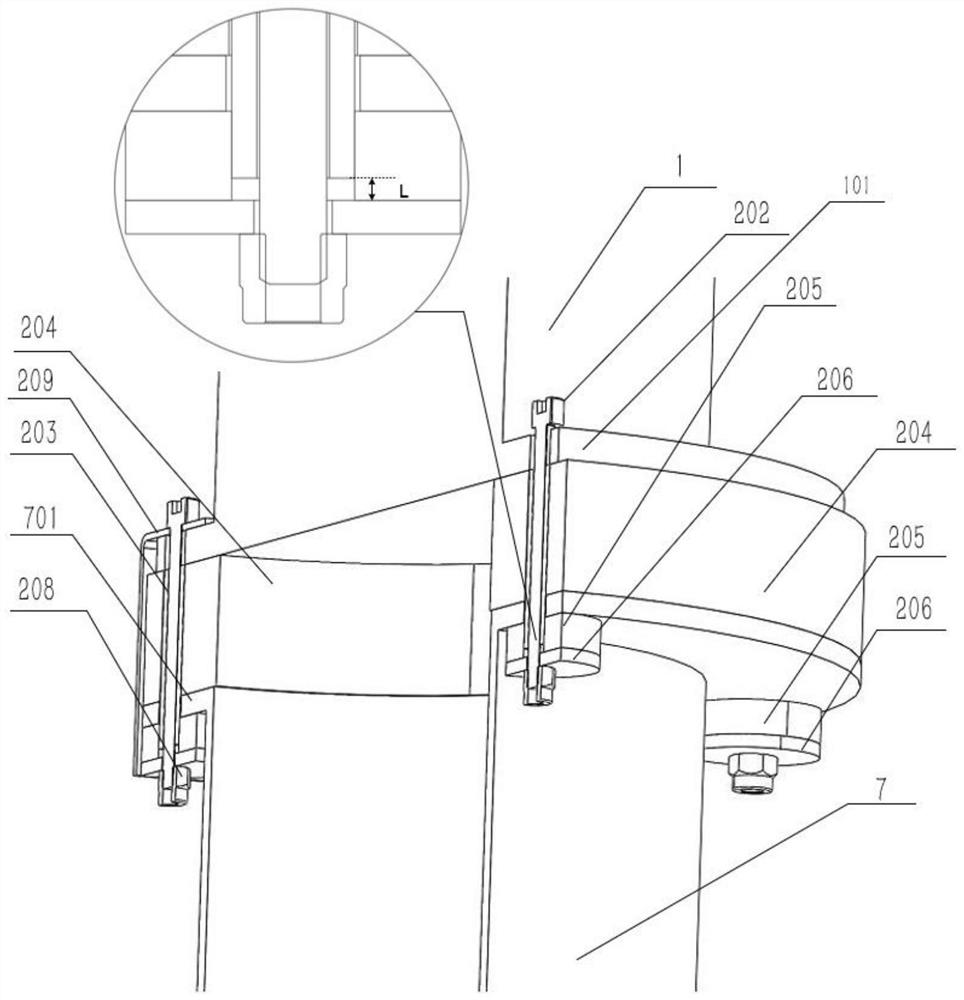
[0057] In this embodiment, there are through holes in the large shock absorbing pad 204, the shaft seat 701, and the small shock absorbing pad 205 to communicate with each other to form a first through hole; the sleeve 203 is accommodated in the first through hole; The position corresponding to the first through hole is provided with a second through hole; the aperture size of the second through hole is smaller than the aperture size of the sleeve 203; the bolt 202 passes through the second through hole, and extends out of the small shock absorbing pad 205 outside, and the bolt 202 A nut 208 is installed on the part extending out from the outside of the small shock absorbing pad 205 . The upper end of sleeve pipe 203 is arranged on the lower surface of platform support 101, and the lower end is arranged in the inside of the through hole of small shock absorbing pad 205, leaves the shape between the bottom of the through hole of sleeve pipe 203 lower end and small shock absorbin...
Embodiment 2
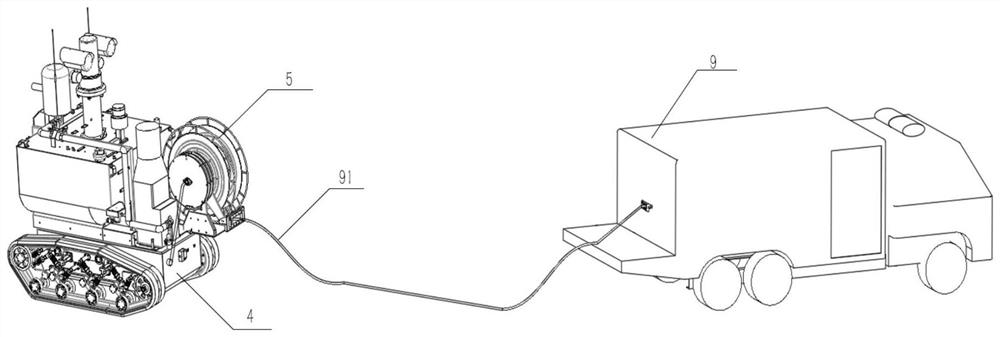
[0060] In this embodiment, when the power of the battery box of the robot is insufficient, the end of the cable 91 carried by the reel 5 is pulled by manual or mechanical equipment, connected with the power supply interface of the power supply vehicle 9, and powered by the power supply vehicle 9. During charging and robot movement, the real-time tightening of the cable is always achieved by the reel.
[0061] During the charging process, the robot can still work uninterruptedly. Since the reel is mounted on the robot, the adjustment of the cable length is completely realized by the rotation of the reel, which avoids the adverse effects caused by the friction caused by the cable mopping the floor, and greatly improves the battery life of the robot.
[0062] After charging is completed, the cable 91 is separated from the power supply interface of the power supply vehicle 9, and under the action of the coil spring inside the reel 5, the cable 91 is automatically recovered on the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More