

Robot tool magazine tool changing control method and control system
A control method and robot technology, applied in the direction of manufacturing tools, metal processing machinery parts, clamping, etc., can solve the problems that the operator cannot change the tool change program of the robot, the operating ability of the operator is uneven, and the heavy workload, etc., to achieve Reduce the difficulty of programming, reduce the programming workload, and ensure the effect of correctness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
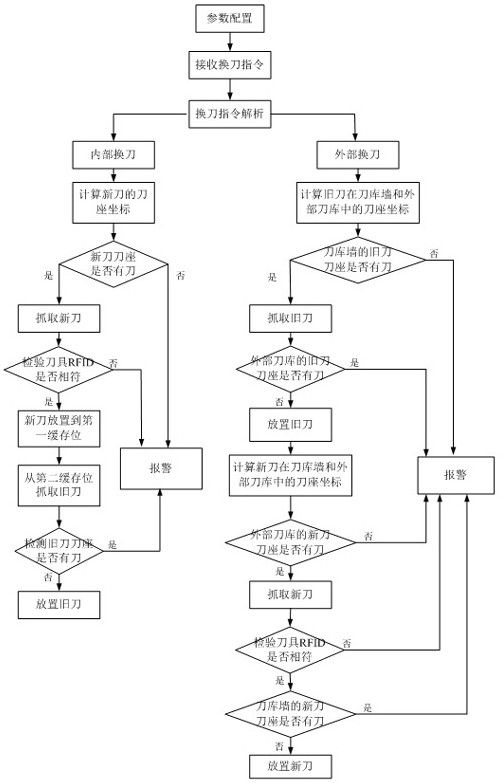
[0060] like figure 1 As shown, a method for controlling tool change in a robot tool magazine of the present invention comprises the following steps:
[0061] Step 1: According to the structure of the tool magazine wall and the external tool magazine, configure the parameters of the tool magazine wall and the external tool magazine. The parameters include the number of tool holders, the number of tool holders, the theoretical offset and the actual offset of each tool holder ;
[0062] During specific implementation, configuring the number of tool holders is specifically: configuring the number of tool holders installed in each row of the matrix tool magazine wall and the external tool magazine and the number of rows of the matrix tool magazine wall.
[0063] During the specific implementation, the configuration of the theoretical offset of the tool seat in the tool magazine wall is as follows: in the coordinate system of the tool magazine wall, configure the X-direction offset...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More