

Fixed-depth directional control method for climbing of hybrid drive underwater robot on curved surface
An underwater robot, directional control technology, applied in non-electric variable control, height or depth control, control/adjustment system, etc., can solve the problem of difficult to coordinate control of underwater robot walking mechanism to stably climb and to climb the working surface Problems such as the inability to obtain contour information a priori
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
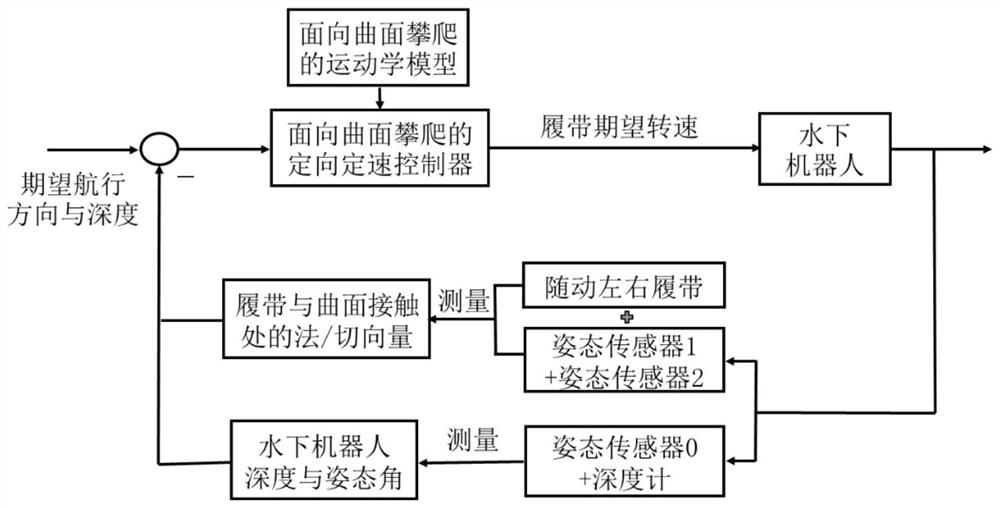
[0049] figure 1 Schematic diagram of the crawler and thruster mixed-drive underwater robot climbing on a curved surface with fixed depth and orientation. Facing the high-efficiency operation requirements of the underwater robot climbing on the curved surface, considering the problem that the contour information of the curved surface to be climbed cannot be obtained a priori, the present invention proposes to use the attitude sensor installed at the center of buoyancy of the underwater robot and the The attitude sensor at the center of the moving left and right track can obtain the surface contour information required by the underwater robot for controller design in real time. On this basis, the reference heading angle of the underwater robot facing the fixed depth and directional climbing on the curved wall is constructed, and the sliding surface is designed by using the attitude angle and track speed information of the underwater robot, and the sliding mode control method is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More