Self-adaptive adjusting method for surgical field of view
A technology of self-adaptive adjustment and field of view, applied in the field of surgical robots, can solve the problems of increasing surgical risks, prolonging the operation time, reducing the operating comfort of doctors in the continuity of the surgical process, etc., to achieve increased safety and smoothness, short operation time, The effect of increasing continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
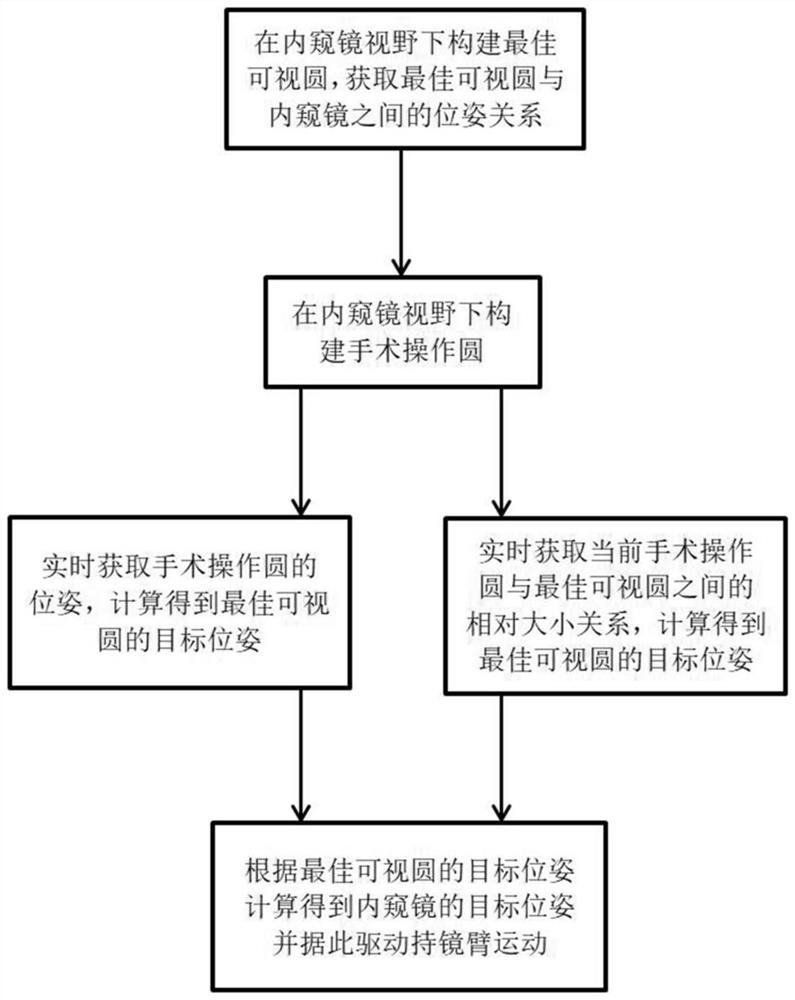
[0035] The method for adaptively adjusting the field of view of the surgical robot of the present invention comprises the following steps:
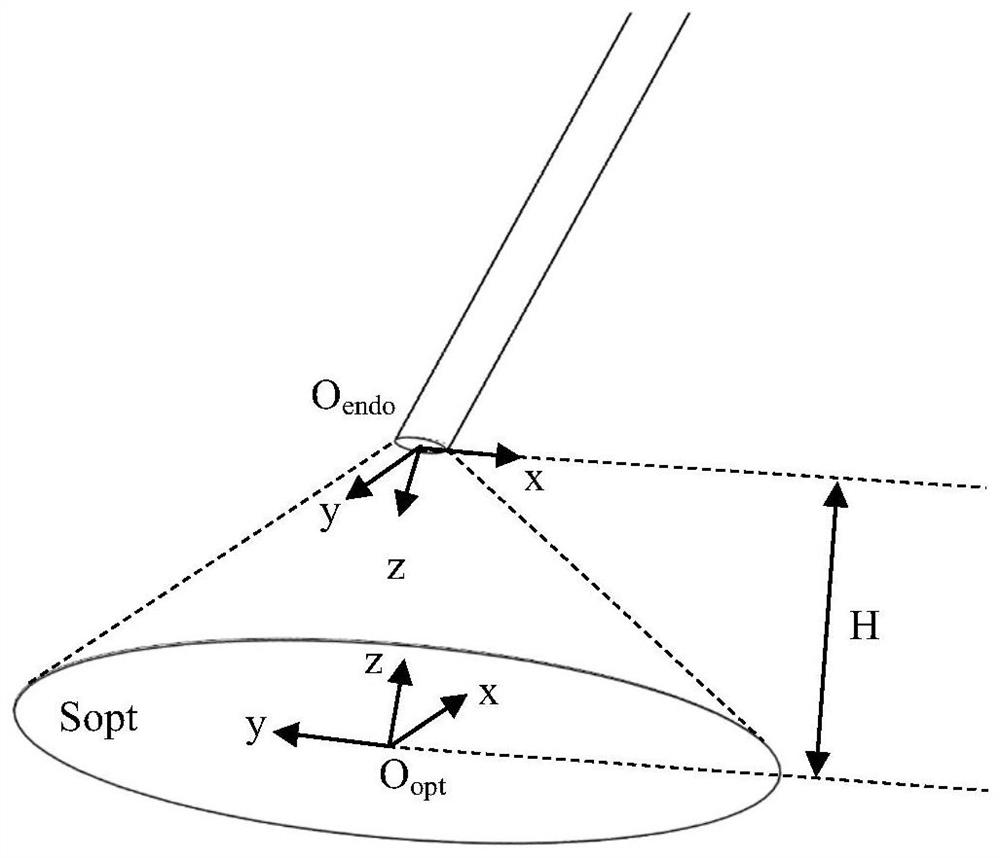
[0036] (1) Construct the best visible circle under the field of view of the endoscope, and obtain the pose relationship between the best visible circle and the endoscope;
[0037] Establish a coordinate system O at the endoscope end endo , the coordinate system O can be obtained through the forward kinematics of the manipulator endo relative to the world coordinate system O world The conversion relationship is [R endo-world ,P endo-world ],R endo-world Indicates the coordinate system O endo relative to the world coordinate system O world The rotation transformation, P endo-world Indicates the coordinate system O endo relative to the world coordinate system O world translation transformation;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com