Unmanned aerial vehicle pose parameter measurement system and method
A technology of pose parameters and measurement methods, which is applied in measurement devices, mapping and navigation, instruments, etc., can solve the problems of inaccurate pose parameters, measurement accuracy easily affected by image acquisition quality and image processing methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS It should be understood that the specific embodiments described herein are intended to illustrate and explain the invention and are not intended to limit the invention.
[0038] In the description of the present invention, it should be noted that, unless otherwise expressly specified or limited, the terms "mounted," "Settings", "connected" are to be broadly understood, for example, the term "connector" may be a fixed connection, may be a detachable connection, or integrally connected; may be directly connected, or may be indirectly connected through intermediary, it may be interaction between the two internal communicating elements or two elements. The specific meaning of the above terms in the present invention can be understood in terms of specific cases.
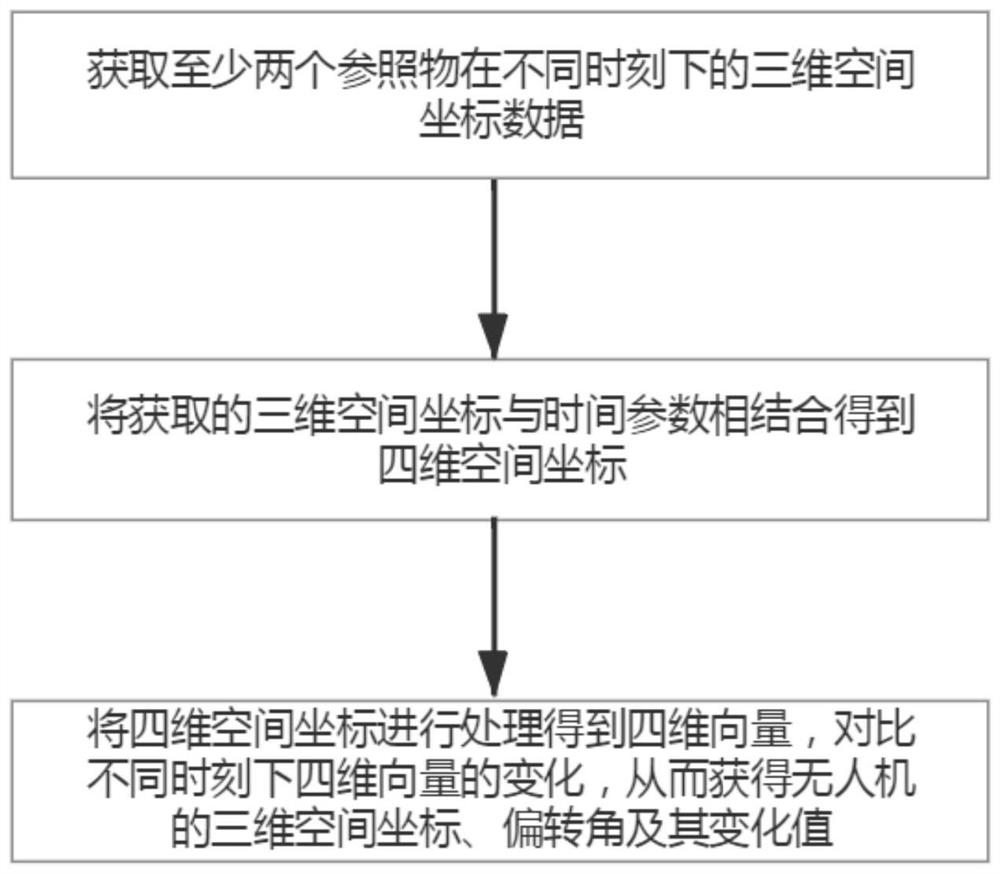
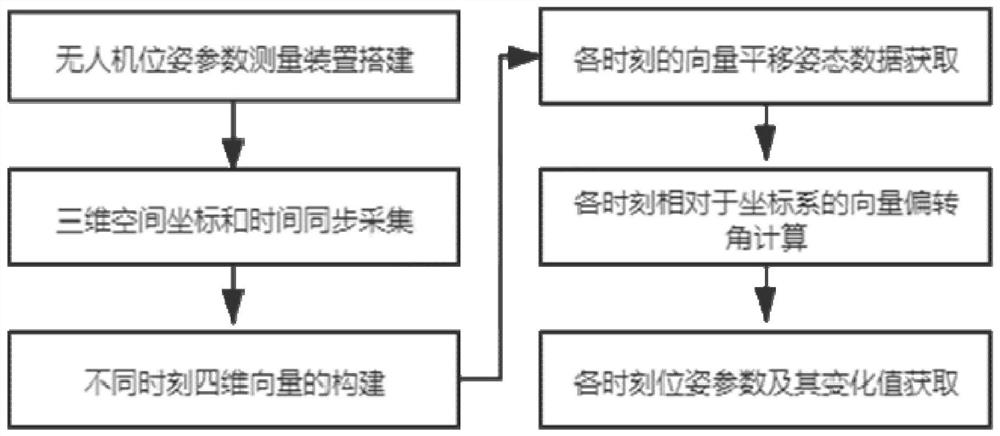
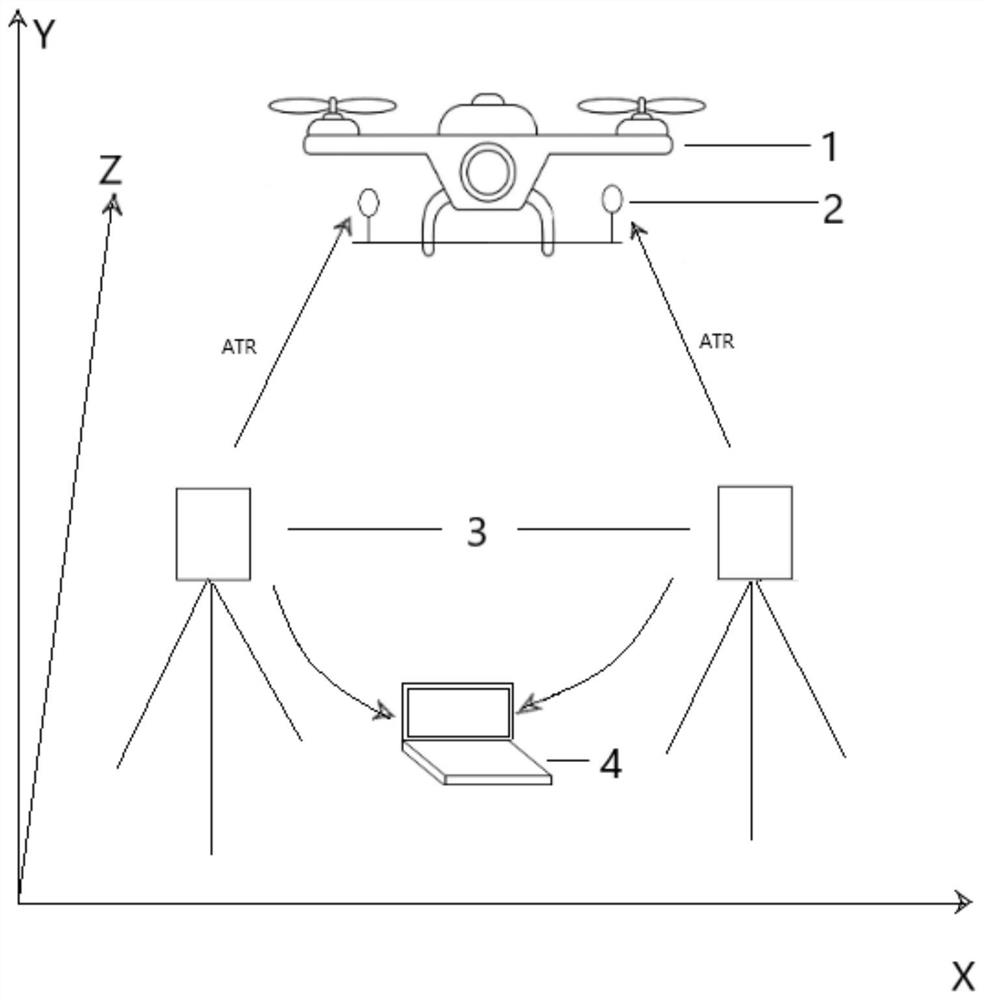
[0039] UAV embodiment of the method of the present invention pose parameter measurements, such as Figure 1 to 2 As shown, including the following steps:
[0040] 1) obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More