

Obstacle map construction method, cleaning robot and storage medium
A technology for cleaning robots and map construction. It is used in cleaning machinery, automatic detection of obstacles, cleaning equipment, etc. It can solve the problems of cumbersome operation, poor experience, manual labeling, etc., and achieve high labeling accuracy, simple and convenient operation, and good experience. effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
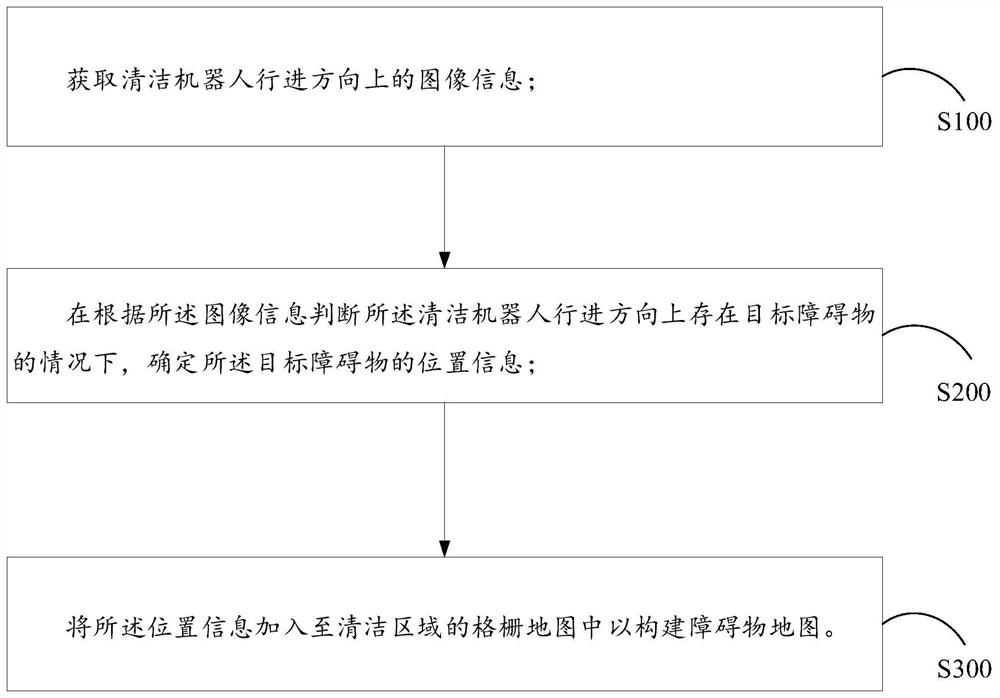
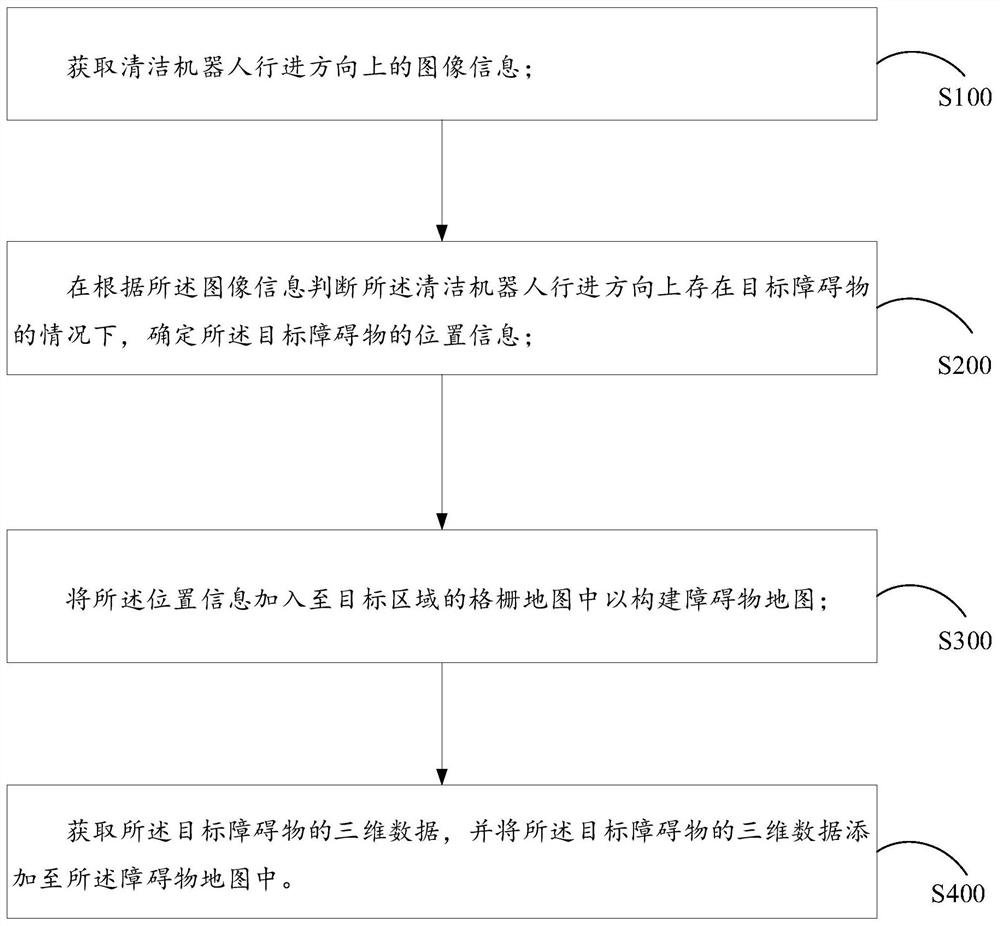
[0047] like figure 1 As shown, the present embodiment provides a method for constructing an obstacle map, the method comprising:
[0048] S100. Acquiring image information in the traveling direction of the cleaning robot;
[0049] In this embodiment, the cleaning robot may be provided with a camera, and when the cleaning robot moves in the cleaning area, the image information in the traveling direction of the cleaning robot may be obtained by controlling the camera to shoot.
[0050] Moreover, the cleaning robot can be controlled to rotate on the spot, and image information around the cleaning robot can be obtained; the cleaning robot can also be controlled to move from one cleaning area to another, and image information in multiple cleaning areas can be obtained.
[0051] Therefore, the cleaning robot can be controlled to move and walk in all cleaning areas that need to be cleaned, so as to obtain image information in all cleaning areas.
[0052] S200. When it is judged acc...
Embodiment 2
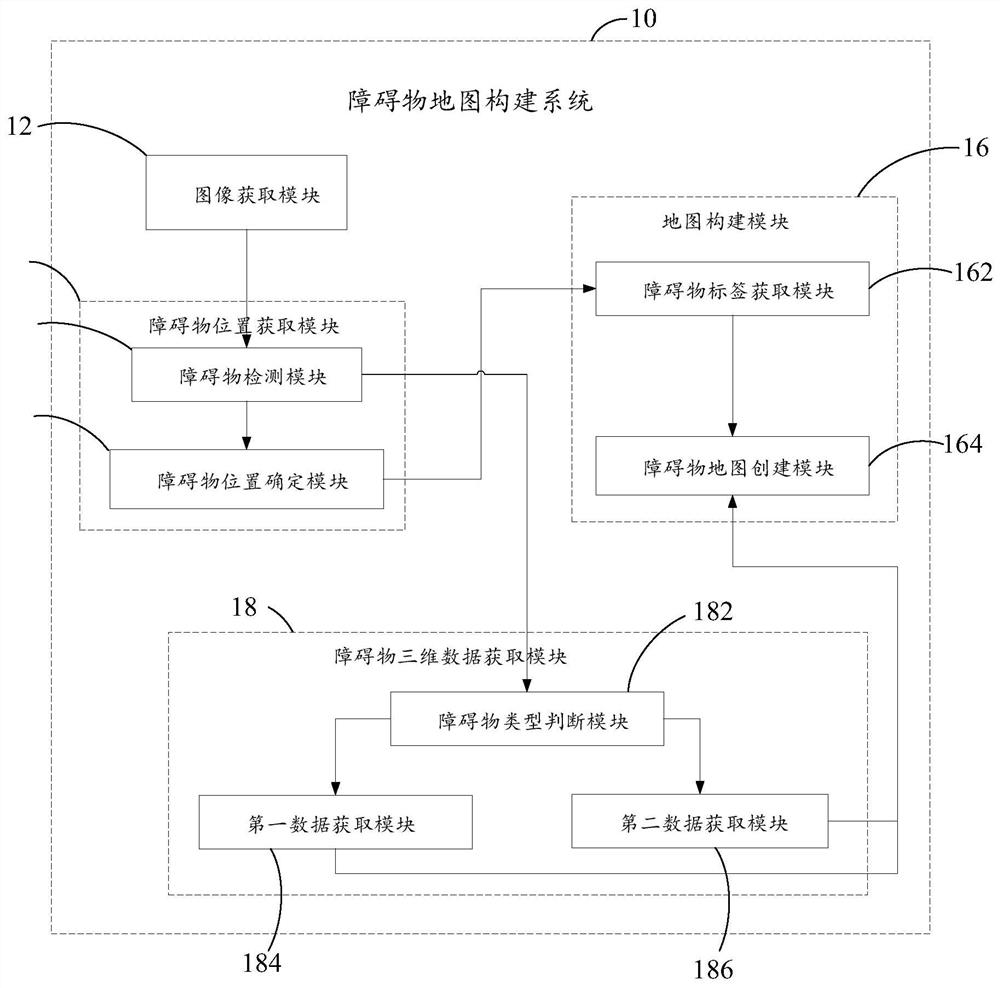
[0094] like image 3 As shown, the present embodiment provides an obstacle map construction system 10, including an image acquisition module 12, an obstacle position acquisition module 14 communicatively connected with the image acquisition module 12, and a map construction system communicatively connected with the obstacle position acquisition module 14 Module 16.
[0095] Wherein, the image acquisition module 12 is used to acquire the image information on the direction of travel of the cleaning robot; the obstacle position acquisition module 14 is used to determine the position of the target obstacle when it is judged that there is a target obstacle in the direction of travel of the cleaning robot according to the image information Information; the map building module 16 is used to add location information to the grid map of the cleaning area to build an obstacle map.
[0096] Further, the obstacle position acquisition module 14 may include an obstacle detection module 142 , ...
Embodiment 3
[0104] like image 3 As shown, the present embodiment proposes a cleaning robot 100, including a robot body 110, a camera 120 disposed on the robot body 110, and a controller disposed on the robot body 110 and connected in communication with the camera 120 (not shown in the figure). ).
[0105] The camera 120 is used to acquire image information in the traveling direction of the cleaning robot 100 . Moreover, the camera 120 may be one of depth cameras such as a TOF camera, a monocular camera, a binocular camera, and a structured light camera.
[0106] The controller is used to: control the camera 120 to obtain image information in the direction of travel of the cleaning robot; determine the position information of the target obstacle when judging from the image information that there is a target obstacle in the direction of travel of the cleaning robot; add the position information to grid map of the clean area to build an obstacle map. Moreover, the controller can be arran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More