Slope ground point cloud segmentation method and system based on multi-line laser radar
A multi-line laser and ground point technology, applied in the radio wave measurement system, image analysis, electromagnetic wave re-radiation, etc., can solve the problems of inability to meet the ground segmentation requirements of the three-dimensional complex slope environment, low ground segmentation accuracy, etc., to improve The effect of efficient, accurate and efficient segmentation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
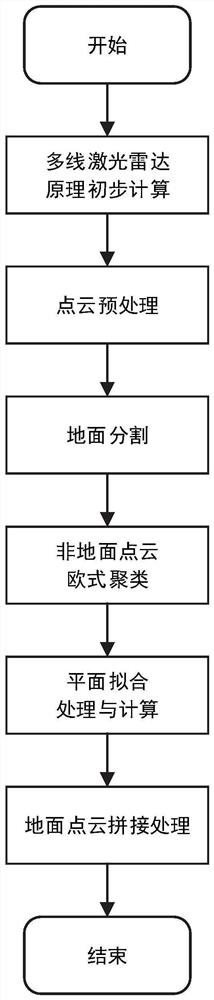
[0057] Such as figure 1 As shown, Embodiment 1 of the present invention provides a method for segmenting slope ground point clouds based on multi-line lidar, including the following process:
[0058] S1: Based on the principle of multi-line laser radar to obtain point cloud information, preprocess the original point cloud and segment reasonable areas.
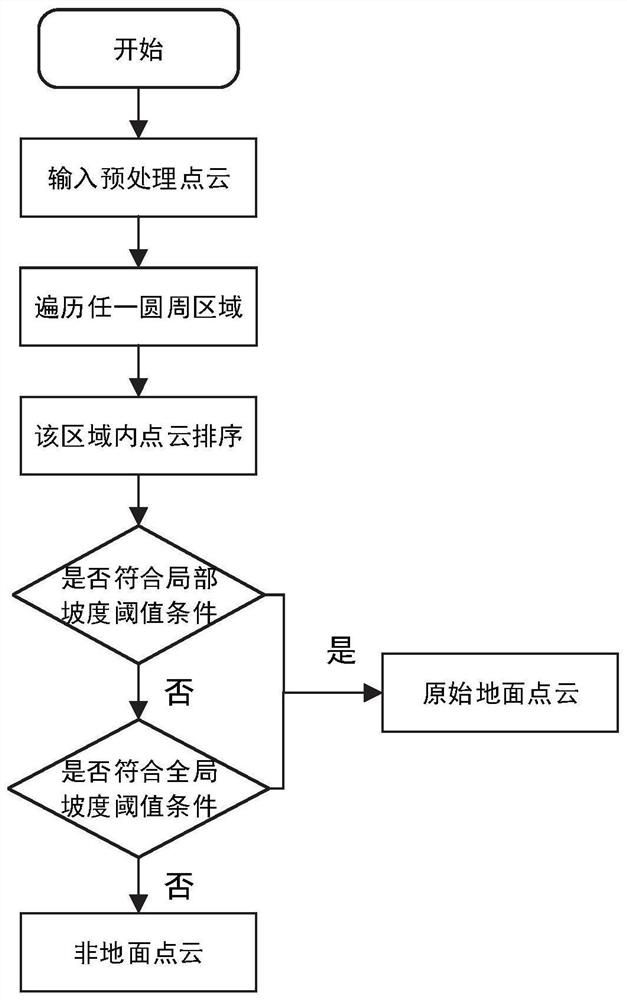
[0059] S2: Use the slope-based ground segmentation algorithm to segment the original point cloud into original ground points and non-ground points.
[0060] S3: Realize the European clustering of non-ground point clouds, and then carry out random sampling and consistent plane fitting for each category, and stitch the point clouds that meet the requirements with the original ground point clouds to realize the ground segmentation of slope scenes.
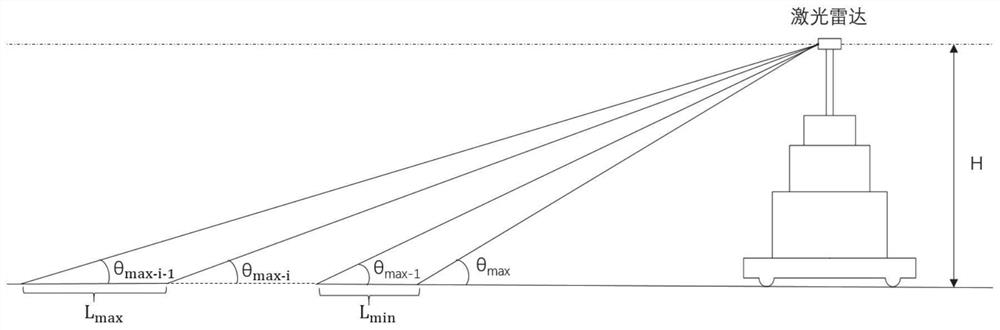
[0061] Specifically, in S1:
[0062] First, since the lidar has a maximum depression angle θ max , therefore, the minimum distance from the lidar to the ground:
[0063]
[0064...
Embodiment 2
[0085] Embodiment 2 of the present invention provides a slope ground point cloud segmentation system based on multi-line laser radar, including:
[0086] The data acquisition module is configured to: acquire the original point cloud data of the multi-line lidar;
[0087] The preprocessing module is configured to: preprocess the original point cloud data;
[0088] The point cloud segmentation module is configured to: perform preliminary ground segmentation processing on the preprocessed point cloud data to obtain non-ground point clouds;
[0089] The slope ground point cloud acquisition module is configured to perform European clustering on non-ground point clouds, perform random sampling consistent plane fitting for each category, and obtain slope ground point clouds based on the fitting results.
[0090] The working method of the system is the same as the multi-line lidar-based point cloud segmentation method for slope ground provided in Embodiment 1, and will not be repeate...
Embodiment 3
[0092] Embodiment 3 of the present invention provides a computer-readable storage medium on which a program is stored. When the program is executed by a processor, the method for segmenting slope ground point clouds based on multi-line laser radar as described in Embodiment 1 of the present invention is implemented. in the steps.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com