

Steering and braking integrated path tracking control method based on dimensionality reduction model
A path tracking and control method technology, applied in the direction of control devices, can solve the problems of heavy calculation burden, difficulty in application, and vehicle skidding, and achieve the effect of solving heavy calculation burden, improving real-time performance, and avoiding vehicle skidding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0116] In order to make the objectives, technical solutions and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below with reference to the accompanying drawings.
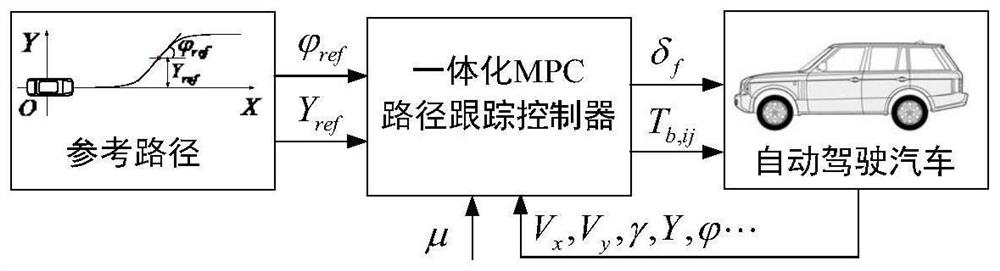
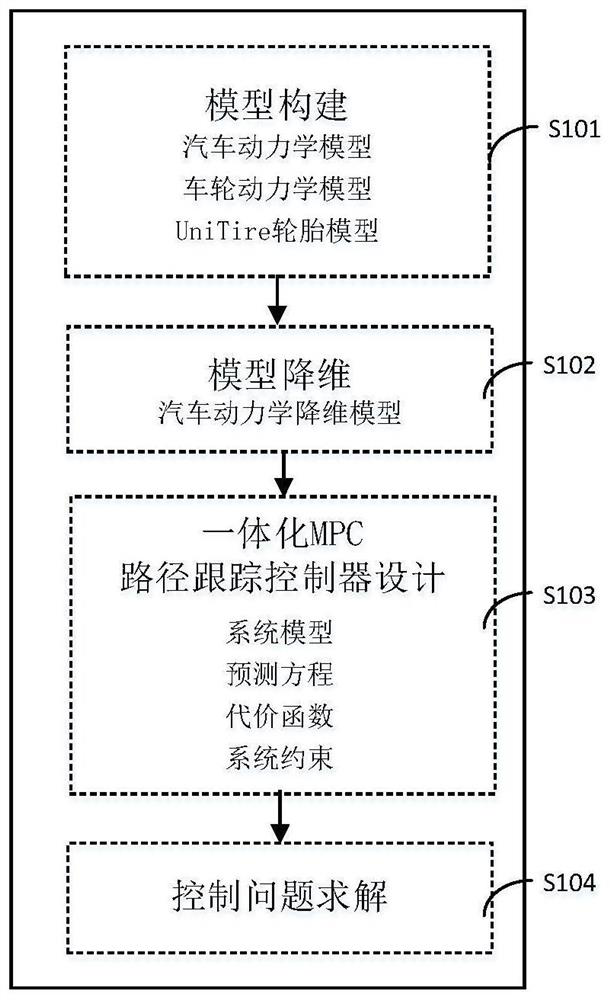
[0117] In this embodiment, a steering and braking integrated path tracking control method based on a dimensionality reduction model is provided, and the overall control logic is as follows figure 1 As shown, the integrated MPC path tracking controller obtains the reference path information, including the reference lateral position Y ref and the reference yaw angle The road friction coefficient μ and the longitudinal velocity V fed back by the self-driving car x , lateral velocity V y , yaw rate γ, lateral position Y and yaw angle Optimize the front wheel angle δ of the car f and the braking torque T of the four wheels b,ij , and input it to the self-driving car to realize path tracking control. In general, if figure 2 As shown, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More