

Meal delivery robot scheduling method and system
A technology for food delivery robots and scheduling methods, which is applied in the fields of instruments, commerce, buying and selling/lease transactions, etc., can solve problems such as the degree of automation needs to be improved, and the sharing of data cannot be achieved, so as to achieve data sharing, improve the degree of automation and efficiency, The effect of reducing labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
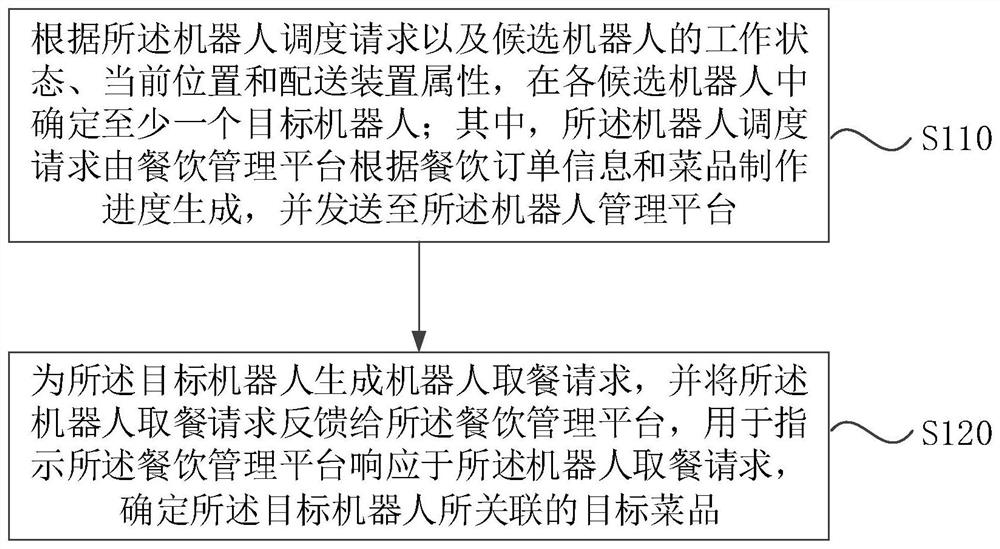
[0025] figure 1 It is a flow chart of a method for dispatching food delivery robots provided in Embodiment 1 of the present application. This embodiment is applicable to the situation where the dispatch of food delivery robots is realized through information interaction between the robot management platform and the catering management platform. The method can be executed by a robot management platform, which can be realized by means of software and / or hardware, and can be integrated into an electronic device running a food delivery robot scheduling system.
[0026] Such as figure 1 As shown, the delivery robot scheduling method includes:
[0027] S110. Determine at least one target robot among each candidate robot according to the robot scheduling request and the working status, current location, and distribution device attributes of the candidate robots; wherein, the robot scheduling request is determined by the catering management platform according to the catering order in...
Embodiment 2
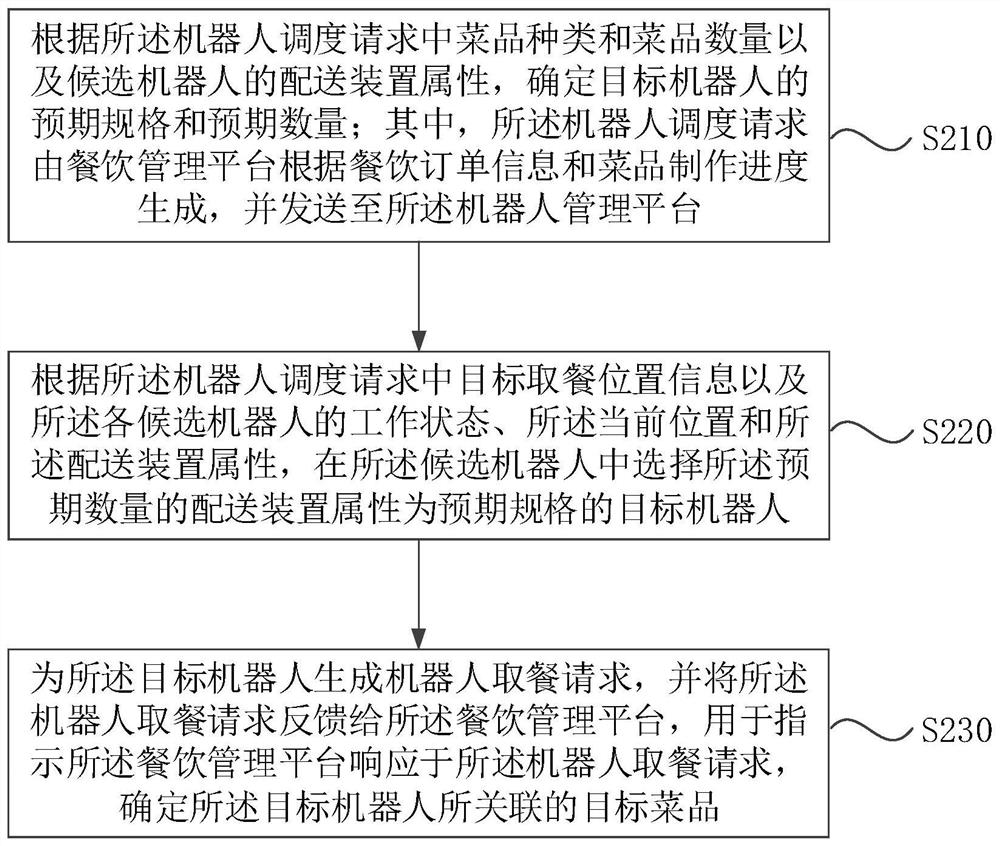
[0047] figure 2 It is a flow chart of another method for scheduling food delivery robots provided in Embodiment 2 of the present application. This embodiment is further optimized on the basis of the foregoing embodiments. The specific optimization is to determine at least one target robot in each candidate robot according to the robot scheduling request and the working status, current location and distribution device attributes of the candidate robots, including: according to the type and quantity of dishes in the robot scheduling request and The distribution device attributes of the candidate robots determine the expected specification and expected quantity of the target robot; according to the target meal pickup location information in the robot scheduling request and the working status of each candidate robot, the current location and the distribution device attributes, Selecting the expected number of target robots whose delivery device attributes are expected specificat...
Embodiment 3
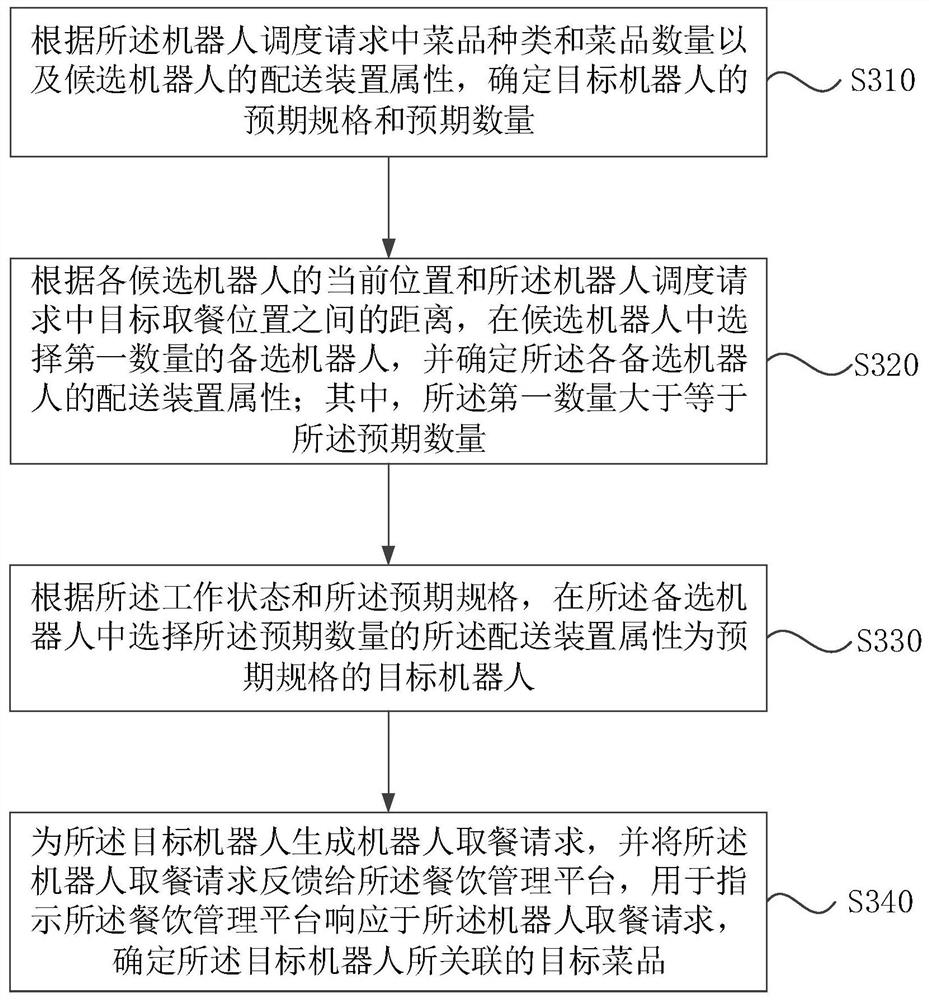
[0061] image 3 It is a flow chart of yet another scheduling method for a delivery robot provided in Embodiment 3 of the present application. This embodiment is further optimized on the basis of the foregoing embodiments. The specific optimization is that, according to the target meal location information in the robot scheduling request, the working status of each candidate robot, the current location, and the attributes of the delivery device, select the expected number of deliveries among the candidate robots The device attribute is the target robot of the expected specification, including: selecting the first number of candidate robots among the candidate robots according to the distance between the current position of each candidate robot and the target meal pick-up position in the robot scheduling request, and determining the The delivery device attributes of each candidate robot; wherein, the first quantity is greater than or equal to the expected quantity; according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More