

Human body joint center determining method based on wearable sensor
A technology of human joints and determination methods, applied in the field of robotics, can solve problems such as inability to determine joint centers, and achieve the effects of simplifying data and algorithms, avoiding magnetic field interference, and having high algorithm efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
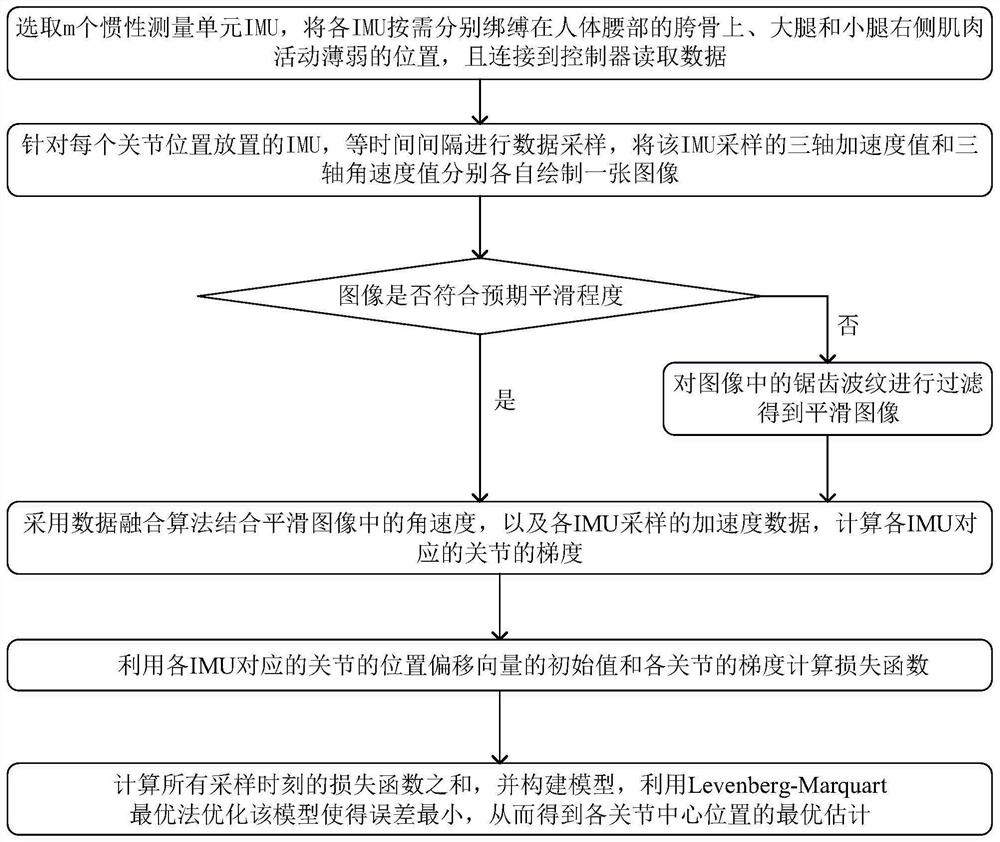
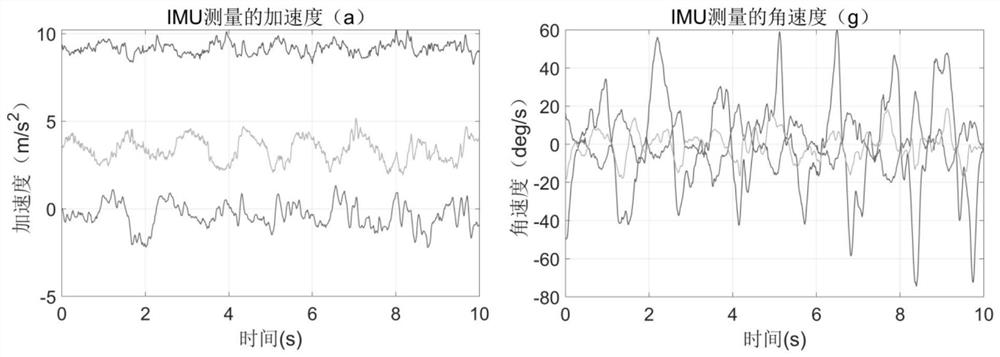
[0091] In this embodiment, one IMU is respectively bound to the hip joint and the lower leg, and two three-axis angular velocity images are drawn by sampling the two IMUs, and a new smooth data set is obtained by filtering the jagged ripples of the images.
[0092] Since two rigid rods are connected by a spherical joint, according to geometric knowledge, the acceleration projections of the centers of the two joints should be equal, and we can get:
[0093]
[0094] If the calf is stationary, (1) can also be written as
[0095]
[0096] where g is the acceleration due to gravity, is the sum of the radial acceleration and tangential acceleration generated by the rotation of the center of the hip joint, is the sum of the radial acceleration and tangential acceleration generated by the rotation of the center of the lower leg joint, which can be defined as
[0097]
[0098] According to the gradient formula
[0099]
[0100] After the calculation of the gradient is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More