

Driving wheel anti-skid and torque optimization fused electric vehicle stability control method
A technology of stability control and driving wheels, applied in electric vehicles, control drives, control devices, etc., can solve the problem of not considering the slippage of driving wheels, and achieve the effect of improving stability and maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0107] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
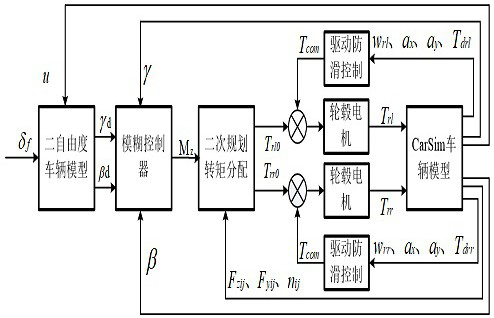
[0108] A driving wheel anti-skid and torque optimization fusion electric vehicle stability control method is characterized in that the method includes a reference model module, a fuzzy controller, a drive anti-skid controller, a torque optimization controller, and a CarSim vehicle model; the reference model The module calculates the reference yaw rate and the side slip angle of the center of mass according to the driver's input and the longitudinal speed of the vehicle; the CarSim vehicle model outputs the actual state quantity of the car; the fuzzy controller calculates the reference yaw rate, the reference side slip angle of the center of mass and the actual state of the car Calculate the additional yaw moment of the vehicle; the torque optimization controller outputs the required torque of the two rear wheel hub motors according to the vehicle deman...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More