

Walking mechanism suitable for multi-cable inspection robot and walking method of walking mechanism
A technology of inspection robot and walking mechanism, which is applied in the field of line inspection robot, can solve the problems affecting inspection robot transmission cable inspection, detachment, walking mechanism jamming, etc., to ensure inspection efficiency and service life, reduce deviation Move friction, avoid the effect of falling off
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
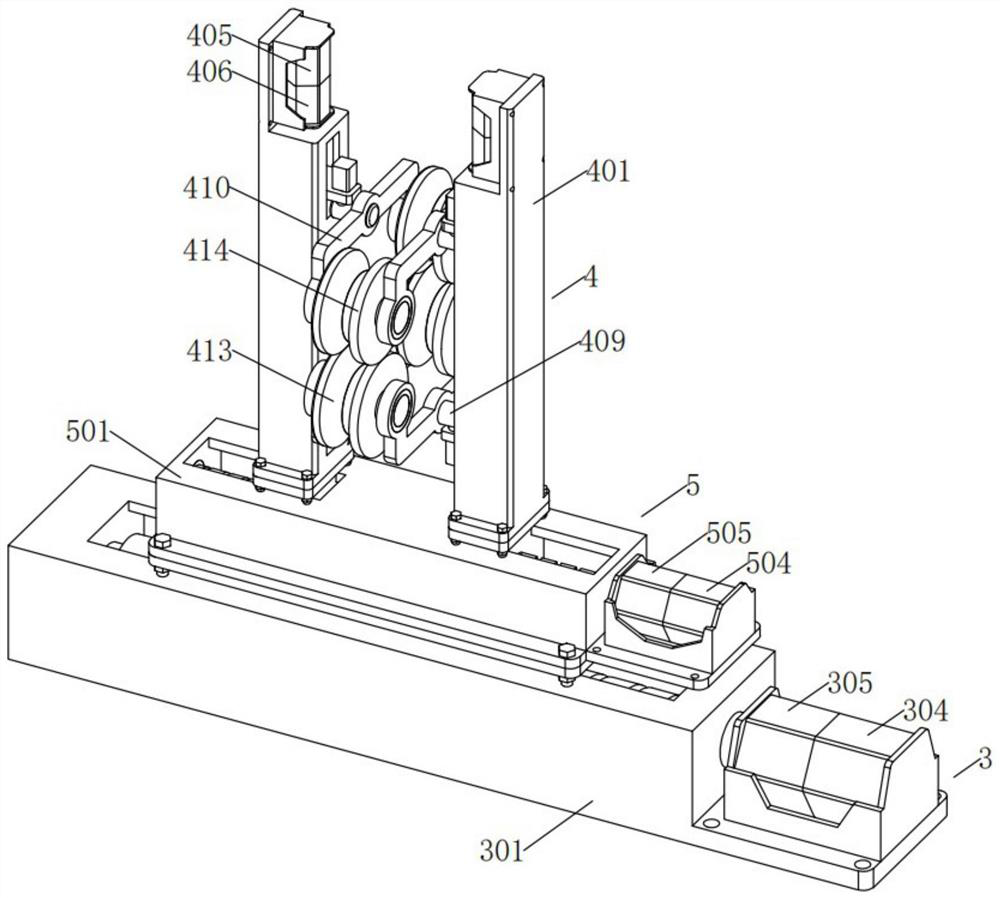
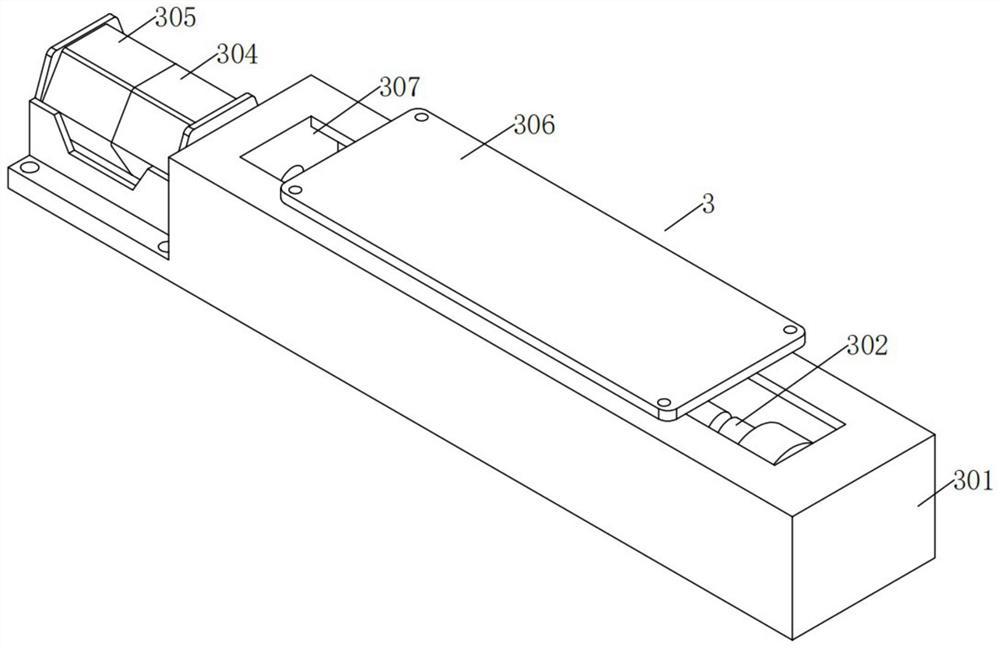
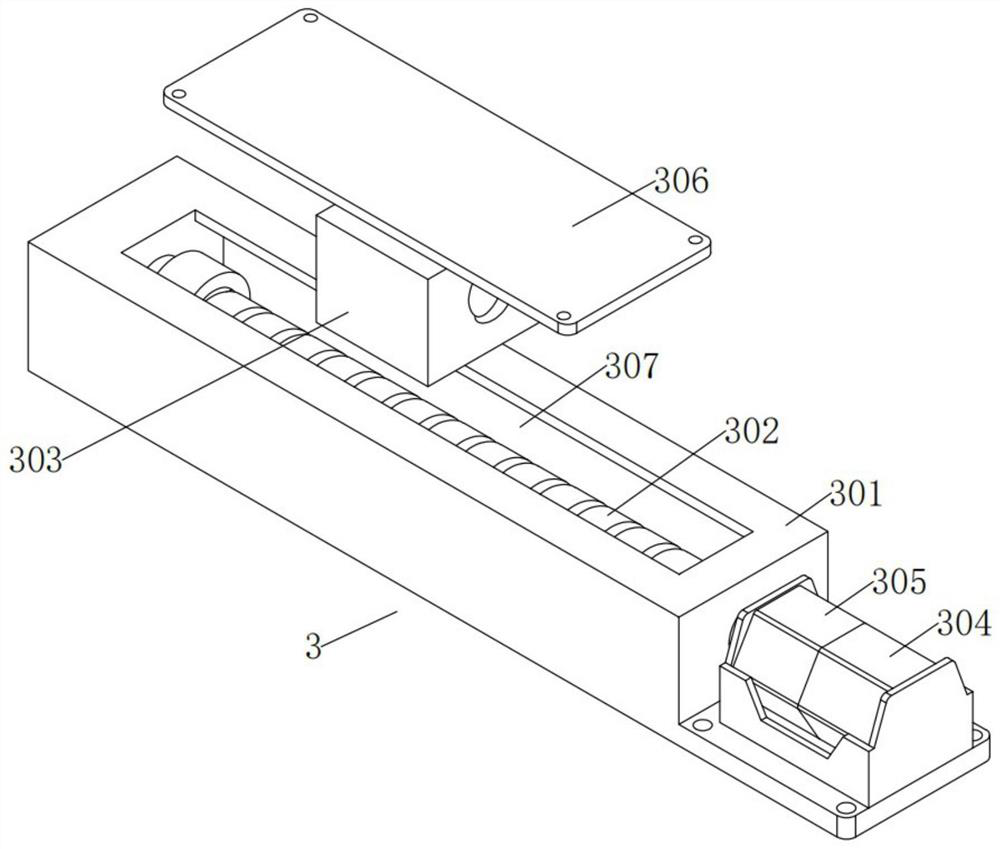
[0060] Such as Figure 1-Figure 12 As shown, the invention discloses a walking mechanism and a walking method suitable for a multi-cable inspection robot. Among them, a traveling mechanism suitable for a multi-cable inspection robot includes a connecting main board 1 and at least two groups of traveling mechanisms 2 .
[0061] Specifically, the connection main board 1 is used to connect the inspection mechanism of the inspection robot.
[0062] At least two sets of walking mechanisms 2 are arranged on the connecting main board 1 along the extension direction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More