

Amphibious inspection device for transformer substation, and inspection method thereof
A technology for substations and inspection paths, applied to switchgear, electrical components, non-electric variable control, etc., can solve problems such as inaccurate fault judgment, low efficiency of inspections, and large power consumption for drone flights , to achieve the effect of improving the accuracy of inspection, improving the efficiency and accuracy of inspection, and scientific and effective management of inspection operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
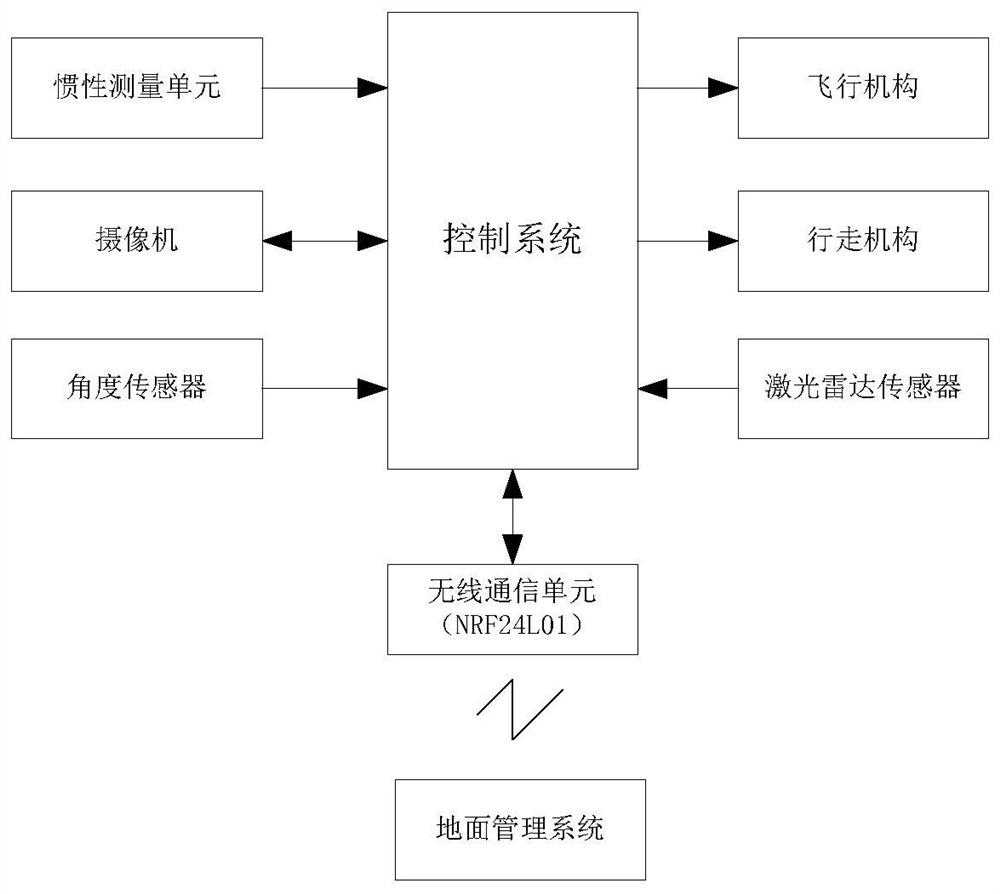
[0066] This embodiment discloses an amphibious inspection device for substations. Based on the device, aerial inspections and land inspections for substations can be realized. In this embodiment, such as figure 1 As shown, the inspection device includes the UAV and the control system on the UAV, the flight mechanism, the walking mechanism, the lidar sensor, the angle sensor, the inertial measurement unit and the camera.
[0067] In this embodiment, the flight mechanism is connected to the control system, and is used to control the UAV to fly in the air under the drive of the control system. In this embodiment, the flight mechanism includes four rotors, and the four rotors are respectively arranged on the motors, and the motors are respectively connected to the control system through the motor drivers, and the control system controls the rotation of the rotors through the motors, so that unmanned The longitudinal and lateral movements of the aircraft are simultaneously complete...
Embodiment 2
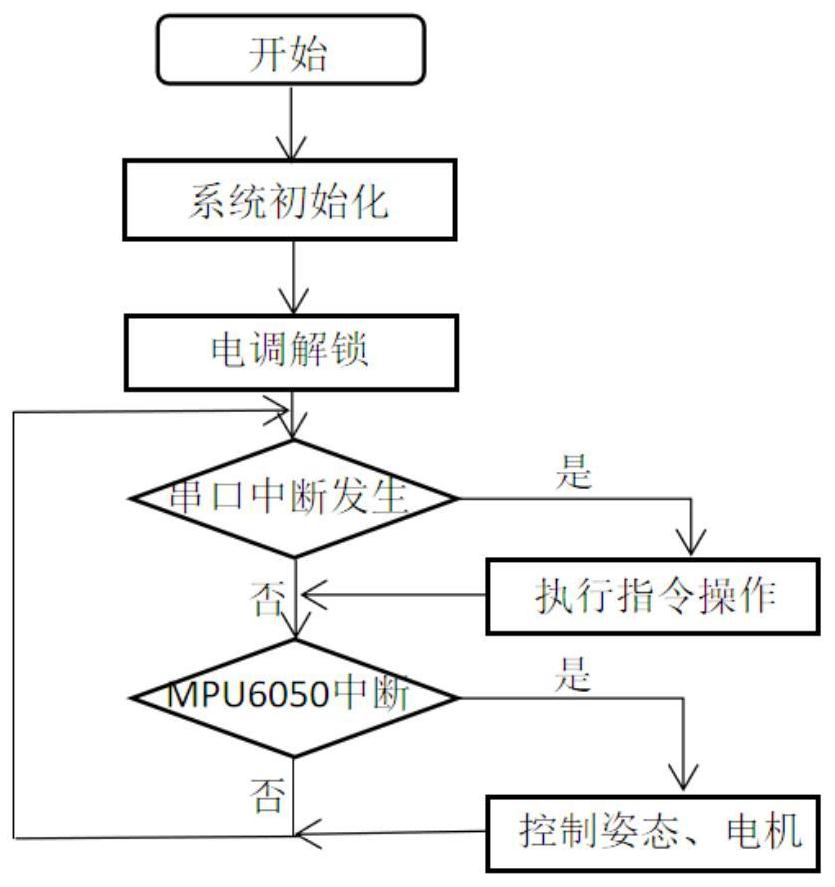
[0083] Disclosed is a substation amphibious inspection method realized by the substation amphibious inspection device described in Embodiment 1, such as Figure 4 shown, including the following steps:
[0084] S1. The ground management system determines the inspection area of the UAV according to the distribution of substations and the actual environment, and assigns inspection objects and inspection contents to the UAV.
[0085] S2. The ground management system plans the inspection path for the UAV in the inspection area according to the inspection object and inspection content of the UAV in each inspection area, where the inspection path includes the flight path and the walking path.
[0086] In this embodiment, the inspection path planned for the UAV in the inspection area is the optimal inspection path, and the optimal inspection path satisfies: the UAV can reach the target point from the starting point based on the optimal path, There are no obstacles in the optimal in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More