

Inverse kinematics solving method suitable for two-section six-degree-of-freedom continuum mechanical arm
A technology of inverse kinematics and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Referring to the accompanying drawings, the present invention will be further described in detail with specific embodiments.
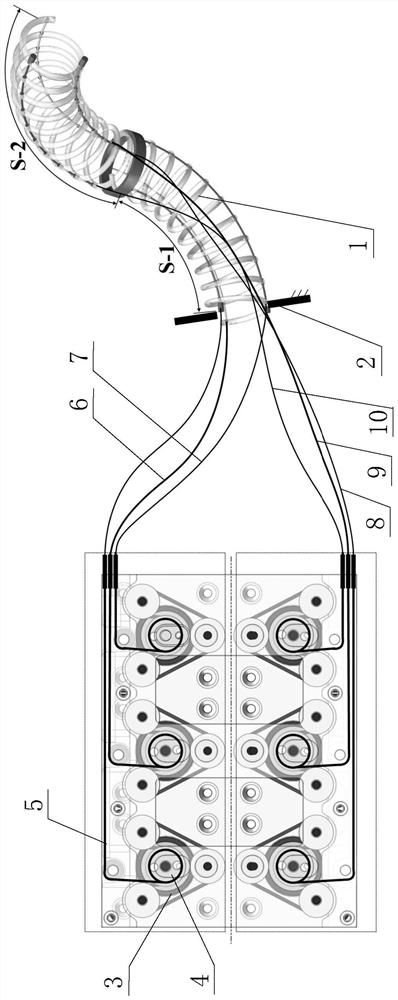
[0050] Such as figure 1 As shown, the coil spring 1 of the 6-DOF continuum manipulator is fixed on the fixed plate 2, and the coil spring 1 is driven by six wire ropes, the first wire rope 5, the second wire rope 6, the third wire rope 7, the fourth wire rope 8, the The fifth wire rope 9 and the sixth wire rope 10 pass through the coil spring 1 , the first winding roller 4 is connected to the output shaft of the first motor 3 , and the first wire rope 5 is wound on the first winding roller 4 . Similarly, the second winding roller is connected with the output shaft of the second motor, the second wire rope 6 is wound on the second winding roller, the third winding roller is connected with the output shaft of the third motor, and the third wire rope 7 is wound on the On the third winding roller, the fourth winding roller is connected with the out...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More