

Vehicle-mounted GNSS/INS/odometer combined navigation method
A technology of integrated navigation and integrated navigation system, which is applied in the field of vehicle-mounted GNSS/INS/odometer integrated navigation, can solve the problem that the lever arm between INS and odometer is not suitable for measurement, and achieve the effect of reducing dependence and increasing universality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
[0047] A kind of GNSS / INS / odometer integrated navigation method, comprises the following steps:
[0048] (1) Establish the Kalman filter model of the GNSS / INS / odometer integrated navigation system including the lever arm effect;
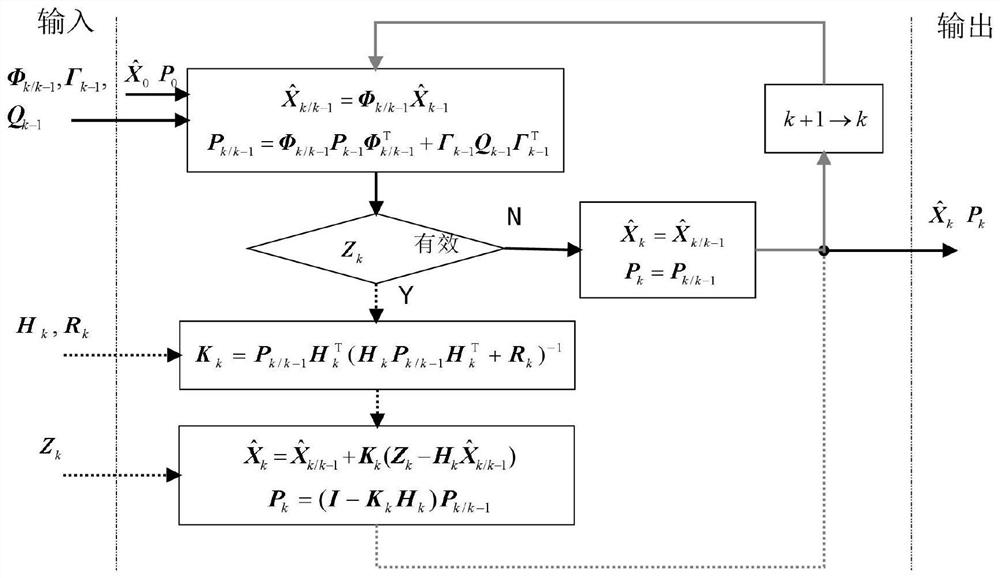
[0049] (2) Use the output of GNSS and odometer, and the non-integrity constraints of the vehicle to perform Kalman filter prediction and update for external observations, and estimate the state vector of the lever-arm effect error.
[0050] The specific method of step (1) is:
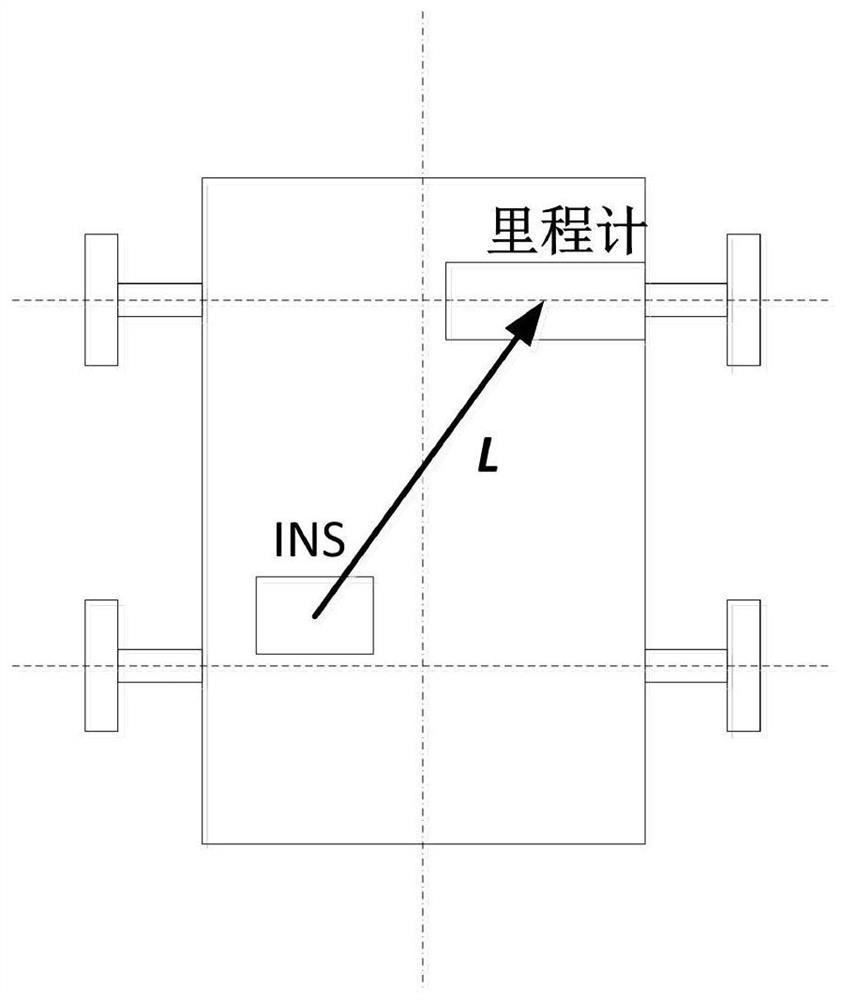
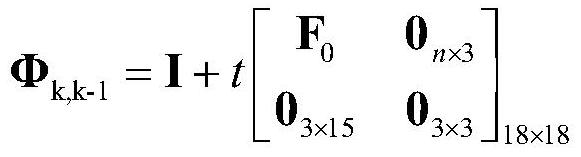
[0051] (101) On the basis of the 15-dimensional state vector y of the Kalman filter of the GNSS / INS loosely integrated navigation system, the state vector L of the Kalman filter with the lever-arm effect is added, and the state vector of the Kalman filter including the lever-arm effect is obtained as :x=[y,L]. Where y is a state vector including p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More