

Vehicle path planning method in complex non-convex environment
A vehicle path, non-convex technology, used in vehicle position/route/height control, motor vehicles, non-electric variable control and other directions, can solve the problems of inappropriate tracking control for planned paths, and many invalid sampling points, so as to reduce invalid The effect of regional probability, improving the success rate, and avoiding the tortuous planning path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
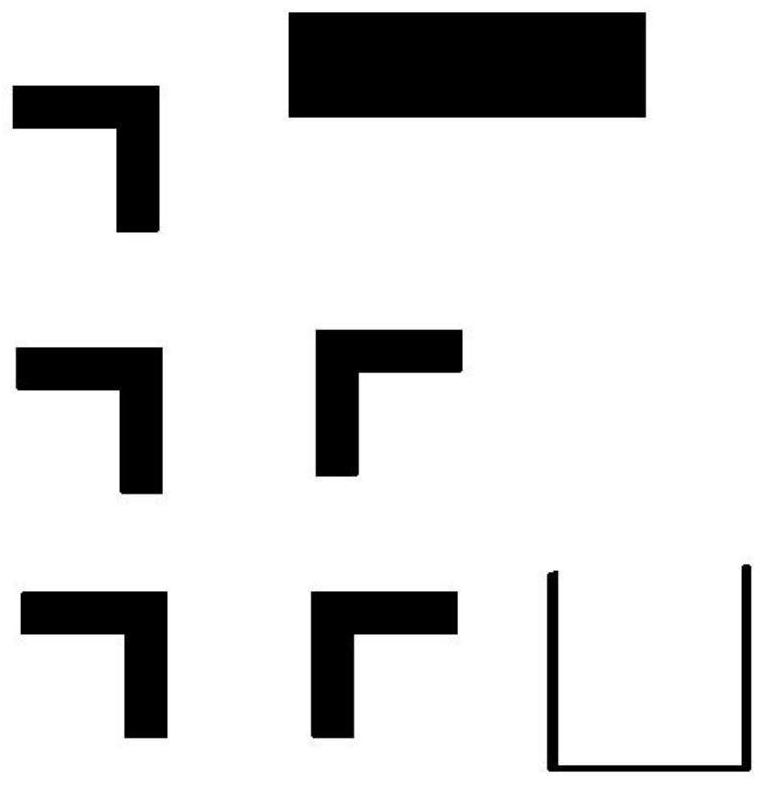
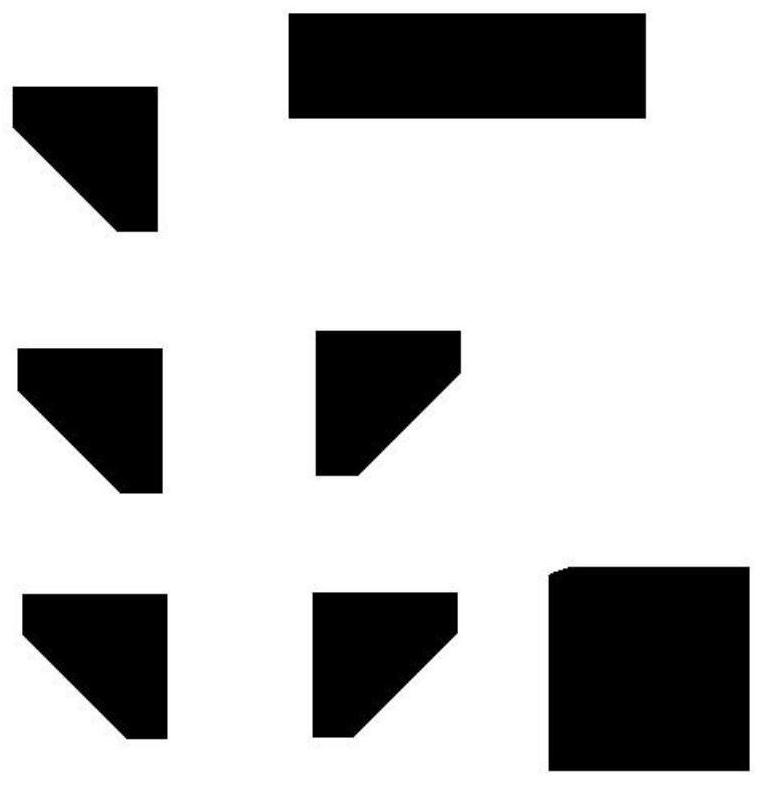
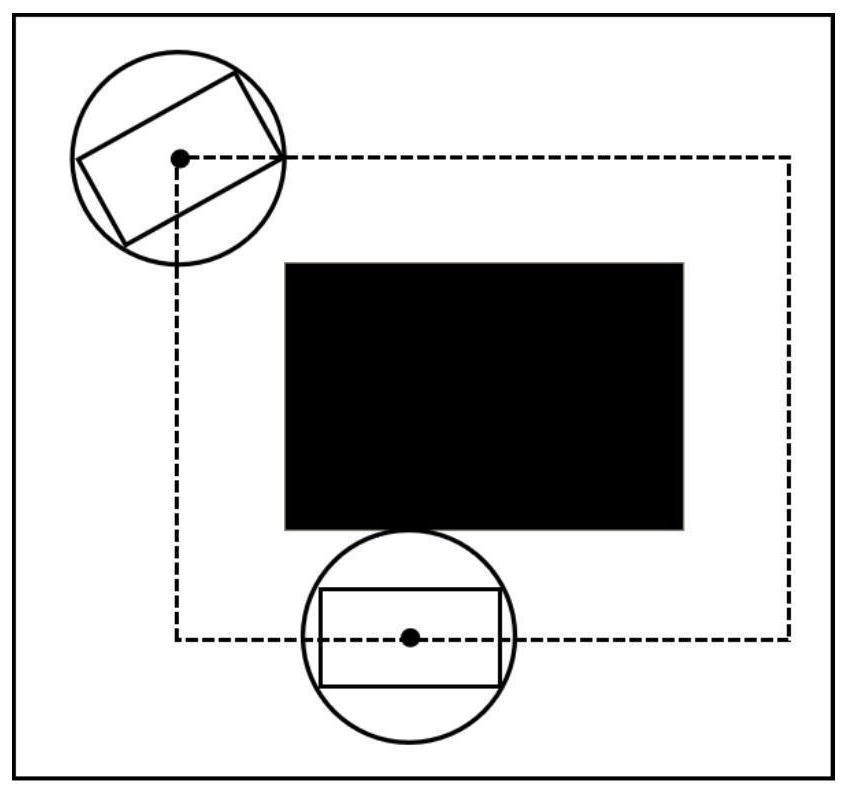
[0034] In this embodiment, a vehicle path planning method in a complex non-convex environment is used for vehicle path planning and tracking control in accordance with the Ackermann steering principle in a non-convex environment. This method obtains the environmental map through lidar, and converts the environmental map into a grid map; identifies non-convex obstacles in the map through image processing methods, and fills them into convex obstacles to obtain a new grid matrix. Afterwards, the improved fast search random tree method is used to plan the vehicle path, and the specific improvements are as follows: 1. Adopt the non-uniform sampling method to reduce the sampling probability of the filled area and improve the speed of vehicle path planning in a non-convex environment; 2. The kinematic constraints of the vehicle are considered in the process of random tree generation to make the generated path smoother. Finally, the planned initial path is subjected to cubic B-spline ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More