Method and device for collecting inclination parameters of unmanned minecart
A parameter collection and unmanned driving technology, applied in two-dimensional position/course control, vehicle position/route/height control, motor vehicle and other directions, can solve the unstable, low sensitivity and inappropriate measurement process of tilt parameters problems, to achieve the effect of easy promotion and use, strong stability and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
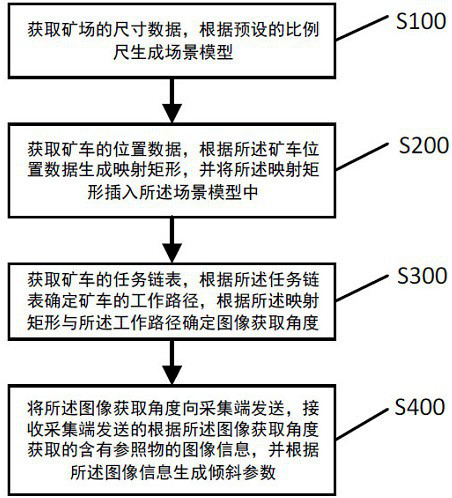
[0069] figure 1 A block flow diagram of a method for collecting tilt parameters of an unmanned mine car is shown. In an embodiment of the present invention, a method for collecting tilt parameters of an unmanned mine car includes steps S100 to S400:
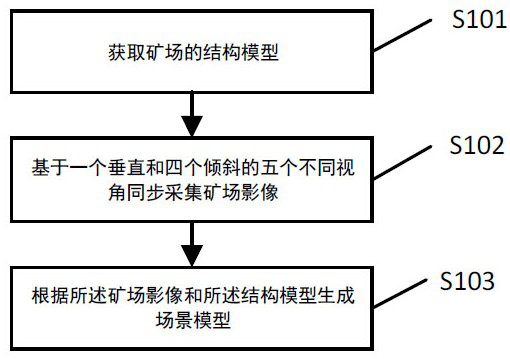
[0070] Step S100: Obtain the size data of the mine, and generate a scene model according to a preset scale;
[0071] The mine refers to the working place of the mine car. It is an area, not a mine in the narrow sense. For example, it is impossible to determine whether there are ore resources in the site before mineral excavation, and naturally it cannot be called a mine, but in Mining machines are sometimes used in exploration work, and correspondingly, the working area is also called "mine field";
[0072] The purpose of step S100 is to display the mine area through the smart device, so that the control end can control the work in the environmental mine area in real time.
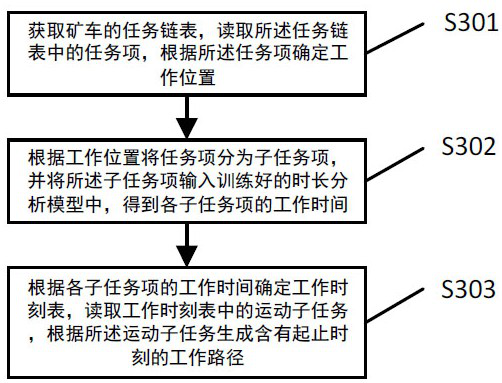
[0073] Step S200: Obtain the position data of the min...
Embodiment 2
[0113] Figure 7 It shows a block diagram of the composition structure of the main control terminal in the tilt parameter acquisition device of the unmanned mine car. In the embodiment of the present invention, a tilt parameter acquisition device of the unmanned mine car, the device includes:
[0114] The acquisition end installed on the mine car is used to receive the image acquisition angle sent by the control end, and acquire image information containing reference objects according to the image acquisition angle; wherein, at least four of the reference objects are respectively arranged on the side of the mine at the corner; the acquisition end includes at least four separate image acquisition modules for acquiring each reference object;
[0115] Control terminal 10, described control terminal comprises:
[0116] Model generation module 11 is used to obtain the size data of the mine, and generates a scene model according to a preset scale;
[0117] The mapping module 12 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com