

Surgical robot path planning method, system and equipment and storage medium
A surgical robot and path planning technology, applied in the field of medical equipment, can solve the problems of high surgical risk, low surgical efficiency, and the inability of the robot to plan a navigation path, so as to improve the patient's surgical efficiency and reduce the surgical risk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Preferred embodiments of the application are described in detail below in conjunction with the accompanying drawings, wherein the drawings constitute a part of the application and together with the embodiments of the application are used to explain the principles of the application and are not intended to limit the scope of the application.
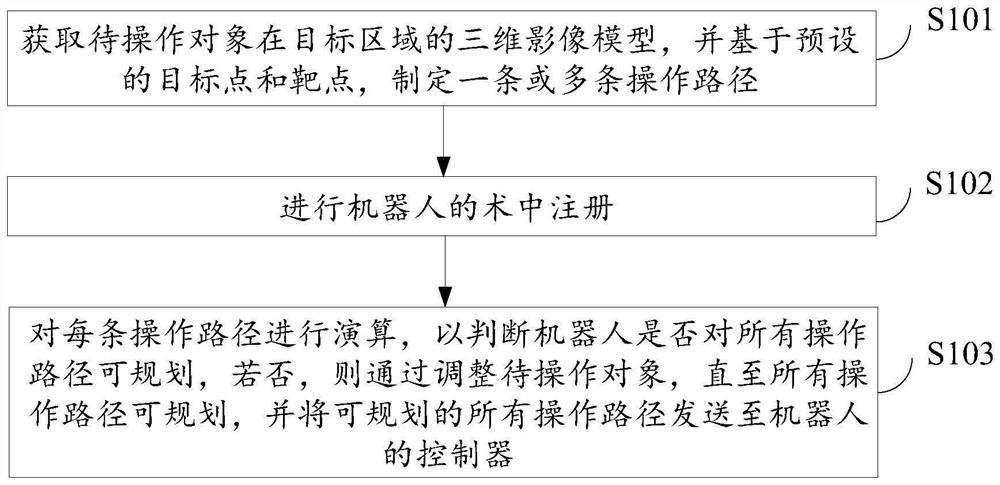
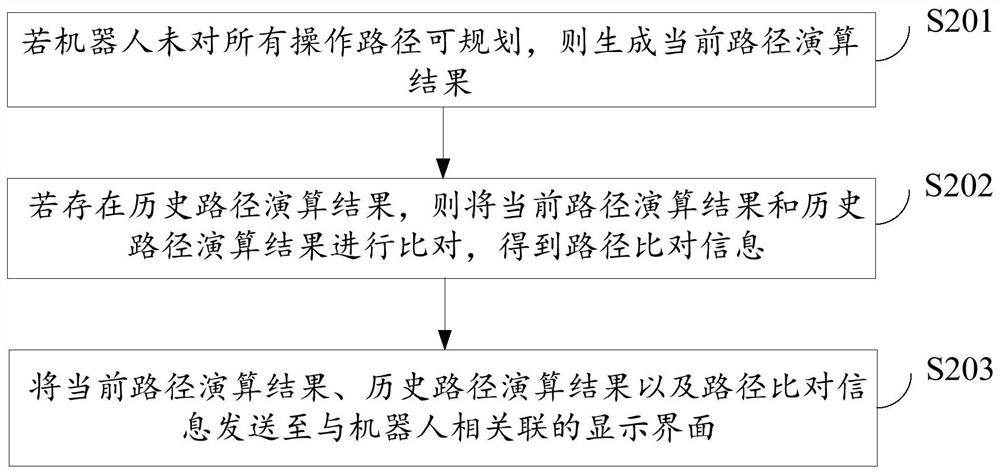
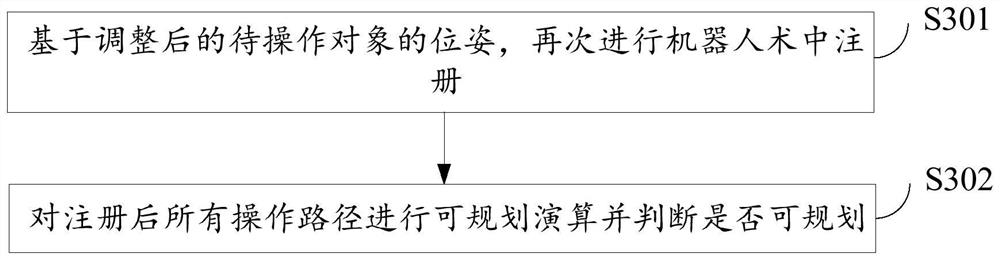
[0039] The path planning method for surgical robots provided by this application is applied to electronic equipment. The electronic equipment can be integrated into the robot, or it can be an independent computing equipment. The electronic equipment obtains the three-dimensional image model of the object to be operated, and combines the preset target points , Target, formulate the operation path, through the calculation of each operation path, determine the planability of the robot for all operation paths, and through repeated adjustments, determine that all operation paths can be planned. In addition, the electronic device can inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More