

Lever type rigidity-variable flexible joint based on cam
A flexible joint and lever-type technology, applied in the field of robotics, can solve the problems of changing rigid structure, narrow rigidity adjustment range, and large joint size, etc., and achieve the effect of various installation methods, continuous adjustment of stiffness, and reduced axial size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
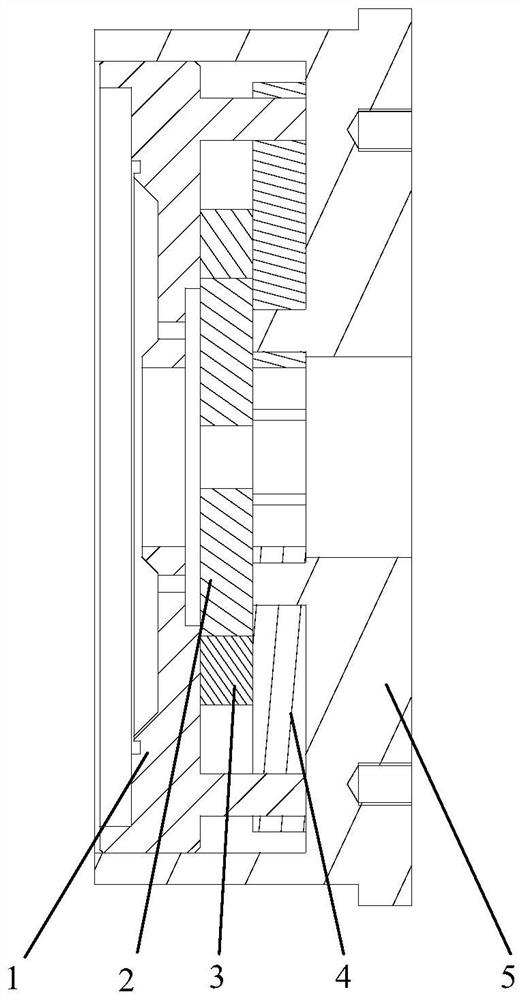
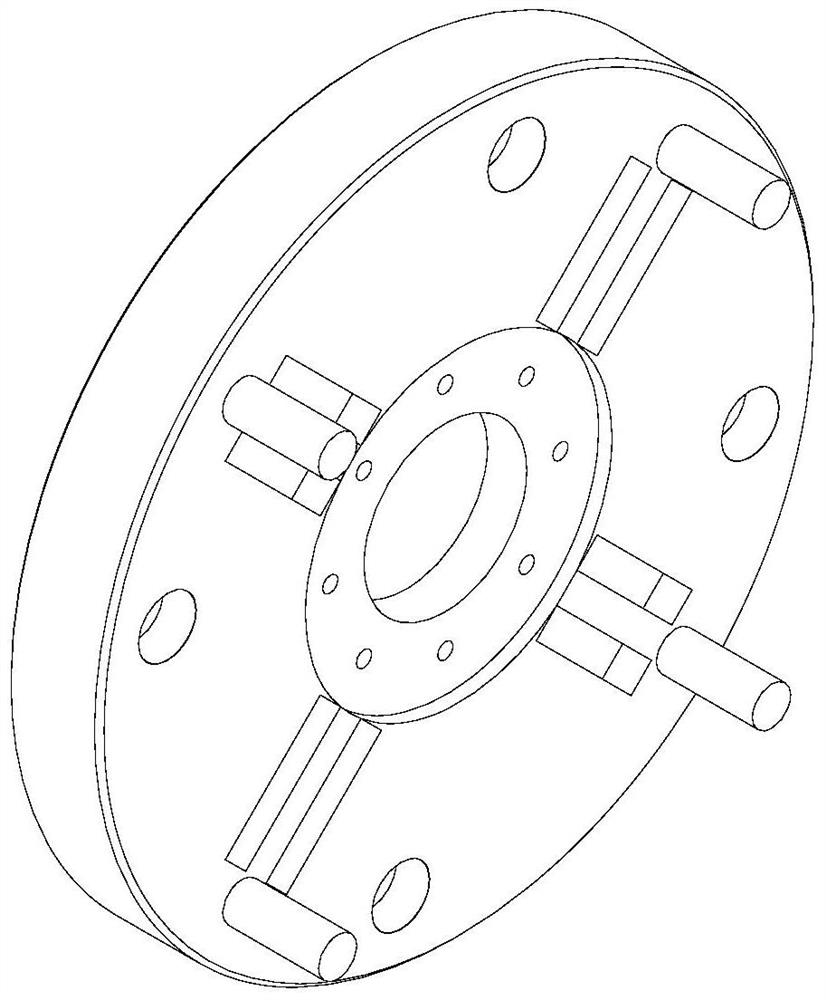
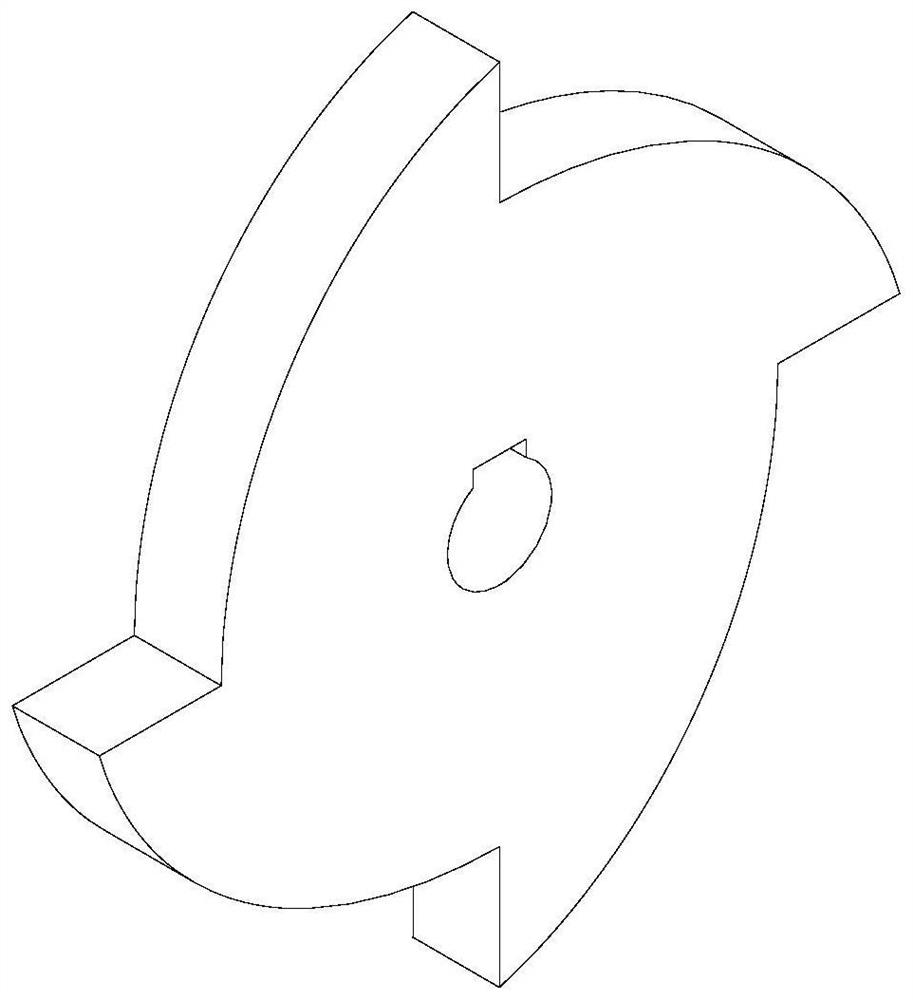
[0037] Such as Figure 7-8 It is a schematic diagram and a sectional view of the installation method of a variable stiffness mechanism and an integrated drive mechanism of a cam-based lever type variable stiffness flexible joint of the present invention. The drive motor 10 drives the drive disc 1 to rotate through the harmonic reducer 9, the stiffness adjustment motor 13 drives the cam disc 2 through the stiffness adjustment motor output shaft 11, and the cam disc 2 and the stiffness adjustment motor output shaft 11 Cooperate, the casing of the stiffness adjustment motor 13 and the casing of the driving motor 10 are fixedly connected. The said stiffness adjustment motor is placed in front, that is, the stiffness adjustment motor is placed at the front end of the integrated drive mechanism. A hollow shaft is arranged inside the integrated drive mechanism 6 . The drive disc 1, the cam disc 2 and the output disc 5 cooperate with the stiffness adjustment motor output shaft 11; t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More