

Global balance control method and device for foot-type robot and foot-type robot
A technology of balance control and robotics, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as the inability to guarantee system stability, and achieve the effect of good stability and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
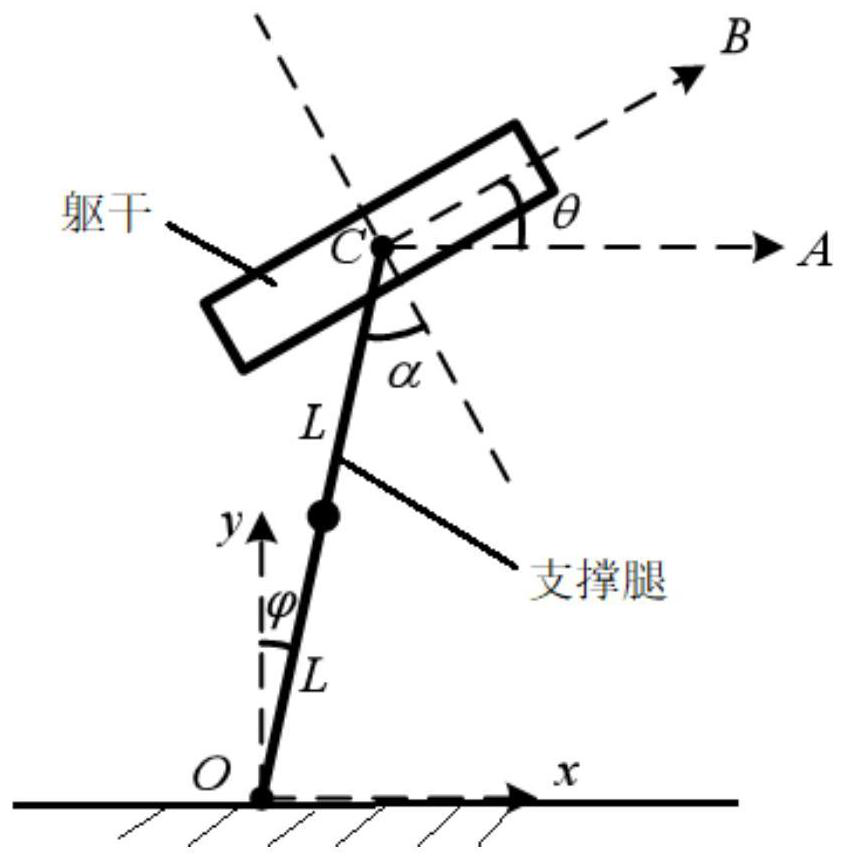
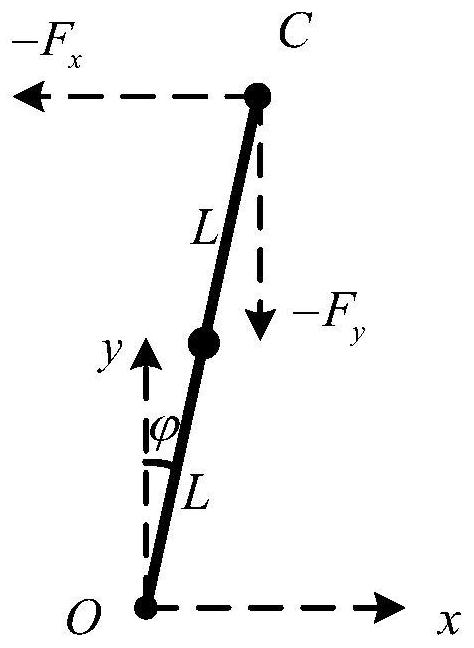
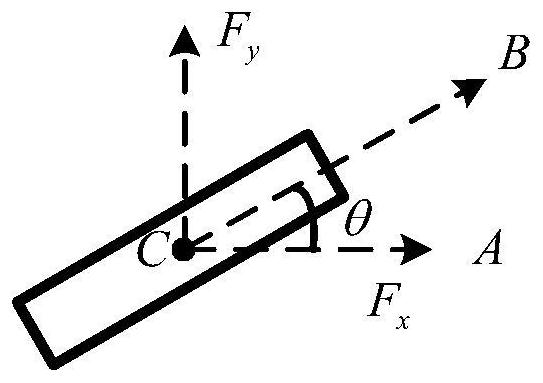
[0056] In this embodiment, in order to realize the global balance control, the model of the legged robot is firstly simplified to obtain a corresponding simplified model, and then the dynamic equation for obtaining the simplified model is constructed. Exemplarily, in one embodiment, the state of the single leg support of the legged robot can be simplified as an inverted pendulum model of a flywheel. Specifically, the torso of the legged robot is equivalent to a rigid body with corresponding mass, where the leg mechanism of the legged robot is installed at the geometric center of the torso, and the supporting legs that are in contact with the outside world are equivalent to the rigid body connected to the rigid body with Connecting rods of corresponding quality.
[0057] figure 1 A schematic diagram of a single-leg model of a legged robot simplified to a planar flywheel inverted pendulum is shown. The ground endpoint is denoted as O, assuming that the torso of the robot is eq...
Embodiment 2
[0118] Please refer to Figure 5 , based on the method of Embodiment 1 above, this embodiment proposes a global balance control device 100 for a legged robot. Exemplarily, the global balance control device 100 for a legged robot includes:
[0119] The state acquiring module 110 is used to acquire the motion state of the legged robot at the current moment.
[0120] The dynamics calculation module 120 is used to obtain the system state equation of the legged robot at the current moment according to the motion state of the legged robot at the current moment and the dynamic equation of the simplified model of the flywheel inverted pendulum corresponding to the legged robot.
[0121] The nonlinear prediction module 130 is used to obtain the control input required for global balance control at the current moment through nonlinear model predictive control according to the system state equation at the current moment.
[0122] The control module 140 is configured to control the moveme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More