

Binocular stereo matching method
A binocular stereo matching and matching cost technology, applied in the field of computer vision, can solve the problems of complex extraction network, reduced running time, and too many parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
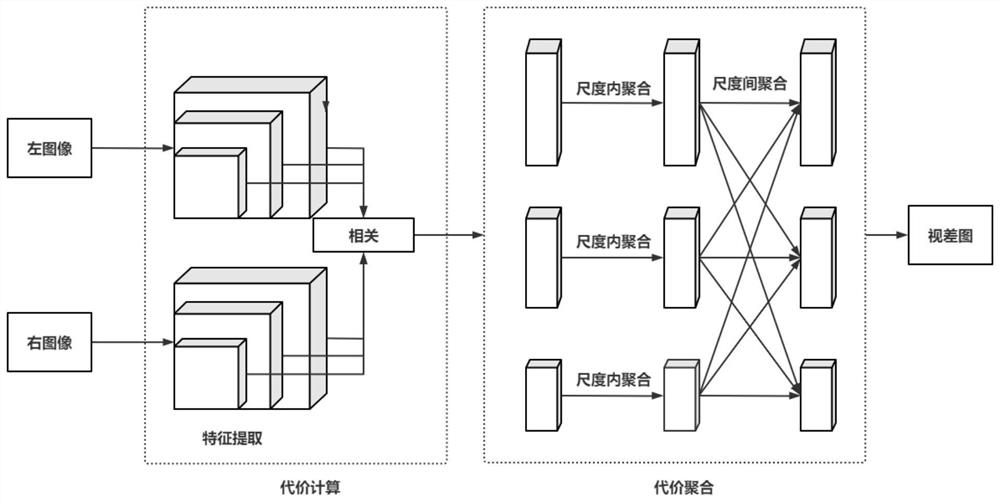
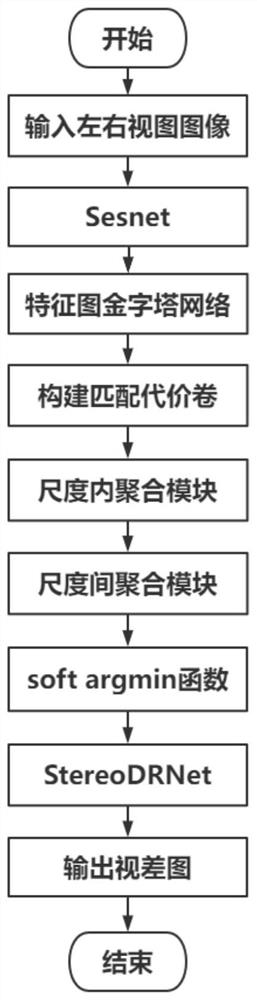
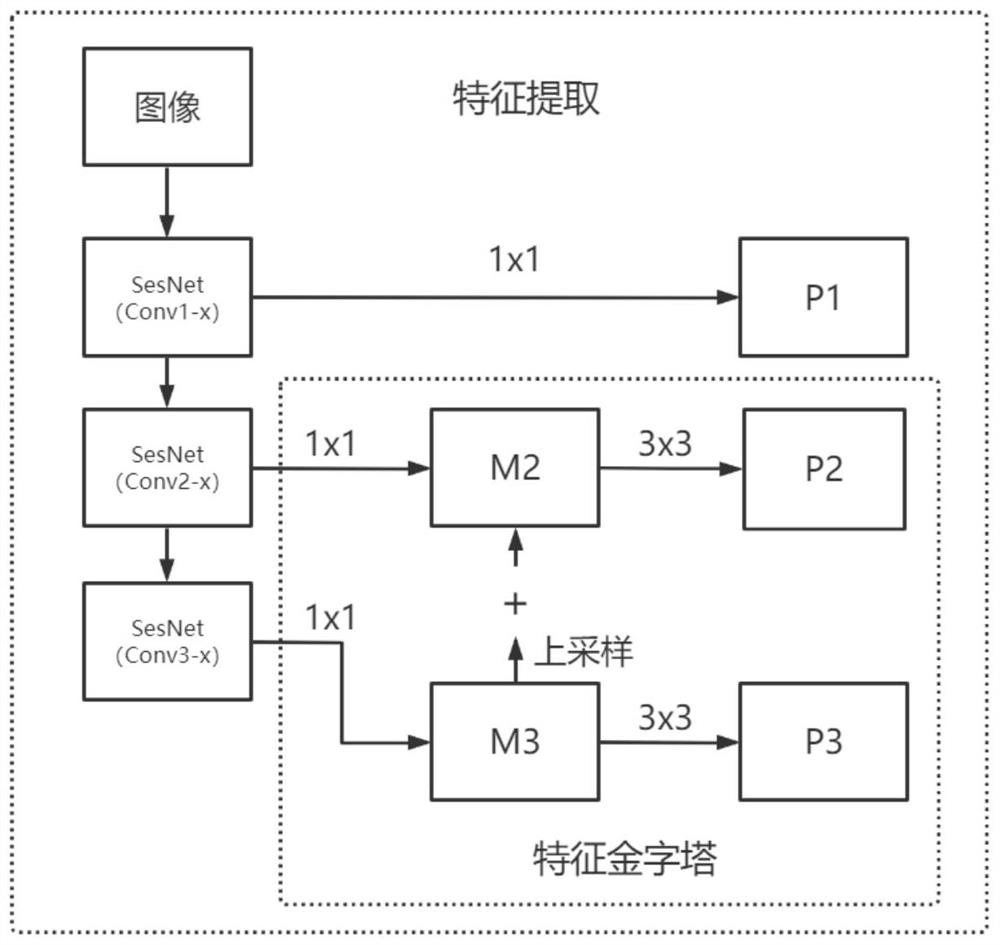
[0065] The present invention proposes an end-to-end network suitable for stereo matching. Firstly, it introduces the data set and training process used in the network training of the method of the present invention. Then, each model is evaluated through different settings, and the advantages of the proposed network in terms of time and memory usage are confirmed by the performance of the Sceneflow test set. Finally, it fine-tunes and verifies its algorithm performance on the KITTI2012 and KITTI2015 datasets.
[0066] 1. Dataset and training process
[0067] The present invention first uses the Sceneflow data set to train the network. The data sets commonly used in the previous stereo matching algorithms, such as KITTI and Middlebury, have fewer training images. In order to improve the performance of the stereo matching network, especially the end-to-end stereo matching The network requires a large amount of data for training. In 2016, CVPR (ComputerVision and Pattern Recognit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More