

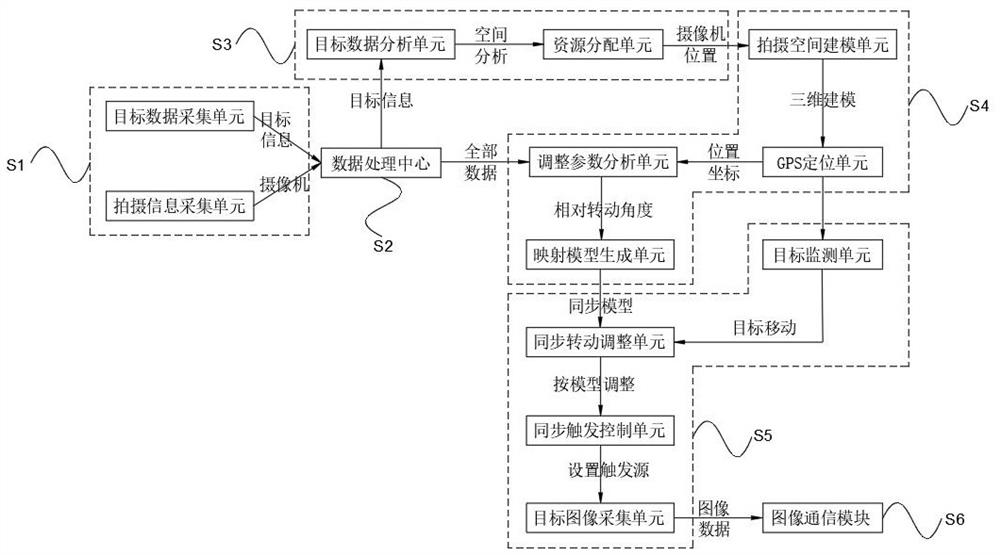
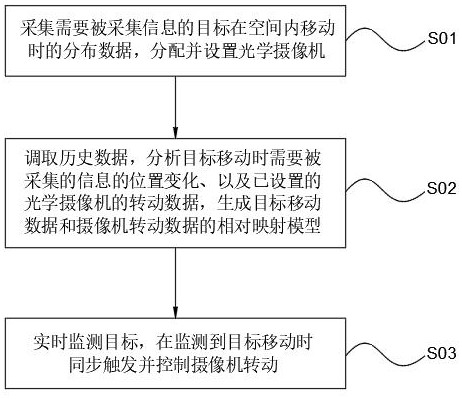
An optical camera acquisition control system and method
A control system and camera technology, applied in closed-circuit television systems, TV system components, image communications, etc., can solve problems such as unreasonable use of resources, increased resource costs, increased work difficulty, etc., to improve the efficiency of image acquisition, improve The effect of speed and equipment cost saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] Embodiment 1: The ground of the shooting space is set as the reference plane, and the shooting space is bisected by m=3 vertical planes perpendicular to the reference plane. angle is , the area of each vertical plane is s 平 =8, the unit is: square meter. It is simulated to set up an optical camera on the vertical line of each vertical plane. The vertical line passes through the center of each vertical plane, and the shooting angles of the three cameras are uniformly adjusted to , the imaging area of the acquired camera is S=7, and when the target moves, the set of times the target appears on the imaging surface that needs to be collected is k={k1, k2, k3}={20, 5, 15}, according to the formula The set of effective coefficients of the image captured by the optical camera on the vertical lines of all vertical planes is obtained as W={W1, W2, W3}={0.42, 0.01, 0.28}, and the effective coefficient threshold is set as w=0.24, compare Wi and w, filter out the effective...
Embodiment 2
[0060]Embodiment 2: After the optical camera is set, three-dimensional modeling is performed on the shooting space, the target and the optical camera are positioned, and the set of camera position coordinates obtained is (x, y, z)={(x1, y1, z1), (x2, y2, z1)}, p=2, number the corresponding cameras, the number set is {1, 2}, simulate the camera to shoot the target, collect it into the historical data, when the target moves randomly once, Confirm the movement vector coordinates of the location of the information to be collected. The distance between the location of the information to be collected before and after the target moves randomly once is di=3, and the angle between the movement vector and the x-axis is , the average value of the difference between the rotation angle of the camera numbered 2 and the rotation angle of the camera numbered 1 every time the target moves is , the data that the target moves M=3 times is collected, and the set of camera rotation angles number...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More