

Apparatus and method for controlling physical system
A physical system and control physics technology, applied in general control systems, control/regulation systems, nuclear methods, etc., can solve problems such as high cost of control parameter values, errors, and complex relationships
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
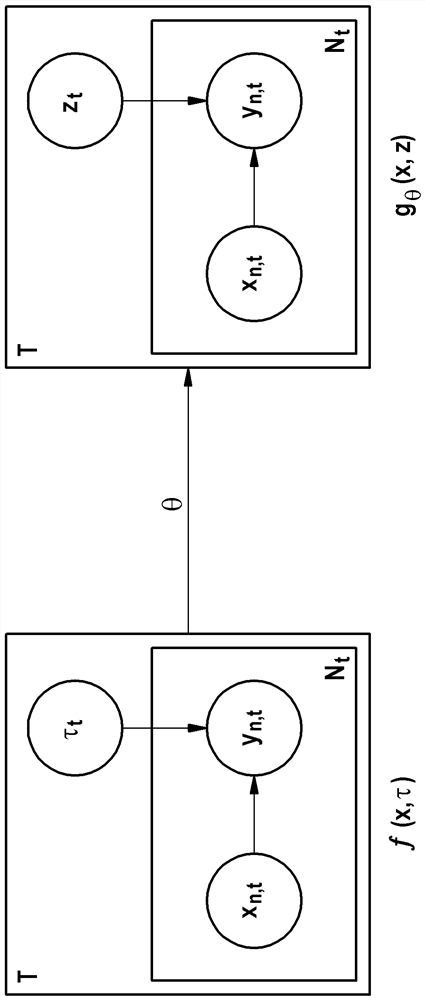
Image

Examples
Embodiment Construction
[0032] The different embodiments, in particular the embodiments described hereinafter, may be realized by means of one or more circuits. In one embodiment, a "circuit" may be understood as any type of logic implementing entity, which may be hardware, software, firmware, or a combination thereof. Thus, in one embodiment, a "circuit" may be a hardwired logic circuit or a programmable logic circuit, such as a programmable processor, eg a microprocessor. "Circuit" may also be software, such as any type of computer program, implemented or implemented by a processor. According to an alternative embodiment, any other type of implementation of the corresponding functions, which are described in more detail below, may be understood as a "circuit".
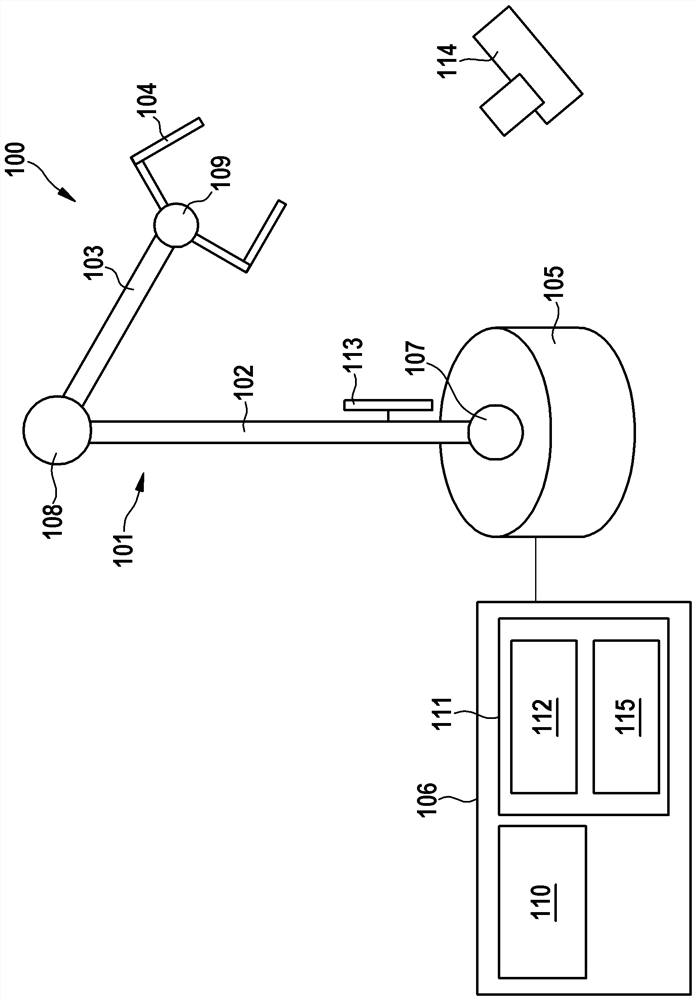
[0033] figure 1 A robot 100 is shown.
[0034]The robot 100 comprises a robot arm 101 (typically a robot element), such as an industrial robot arm for moving, mounting or machining workpieces. The robot arm 101 has robot links 102 , 103...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More