

Obstacle avoidance method of unmanned aerial vehicle in complex dynamic environment
A dynamic environment, UAV technology, applied in three-dimensional position/channel control and other directions, can solve the problem of not being able to predict the trend of dynamic obstacles, and achieve the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
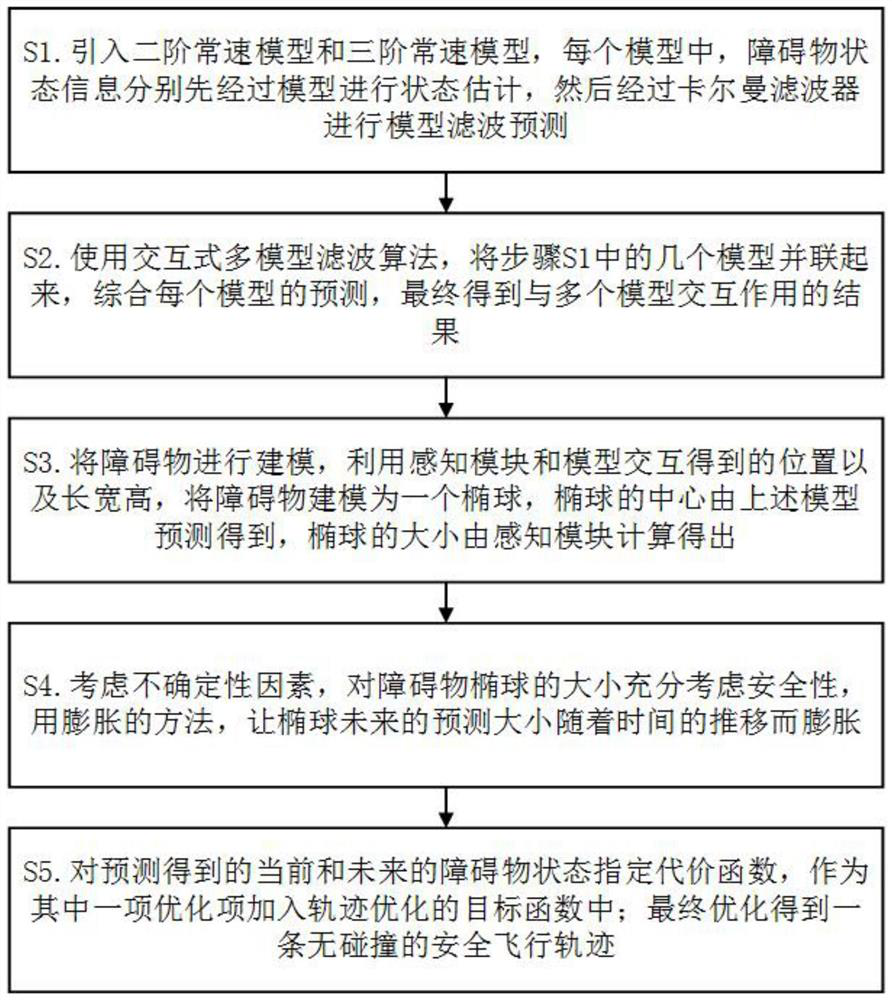
[0053] Such as figure 1 As shown, a UAV obstacle avoidance method in a complex dynamic environment, including the following steps:
[0054] S1. Introduce the second-order constant velocity model and the third-order constant velocity model. In each model, the obstacle state information is first estimated through the model, and then filtered and predicted through the Kalman filter.
[0055] Consider random disturbances. For the maneuvering target under normal circumstances, that is, when the target moves in a straight line at a constant speed or uniform acceleration in most cases, the following second-order constant velocity (Constant Velocity, CV) model and third-order constant acceleration (Constant Acceleration, CA) model can be used .
[0056] Second-order constant velocity model:
[0057]
[0058] Three-order constant velocity model:
[0059]
[0060] In the formula, p, are the components of the position, velocity and acceleration of the obstacle; w(t) is the me...
Embodiment 2
[0095] This embodiment provides an electronic device, including: a memory, a processor, and a computer program stored on the memory and capable of running on the processor, and the processor executes the computer program to realize the drone described in Embodiment 1 Obstacle avoidance methods in complex dynamic environments.
Embodiment 3
[0097] This embodiment provides a computer-readable storage medium on which a computer program is stored. When the computer program is executed by a processor, the obstacle avoidance method for a UAV in a complex dynamic environment described in Embodiment 1 is implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More