

Vehicle control method, device, device and medium based on obstacle recognition
A technology for obstacle recognition and vehicle control, applied in the computer field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
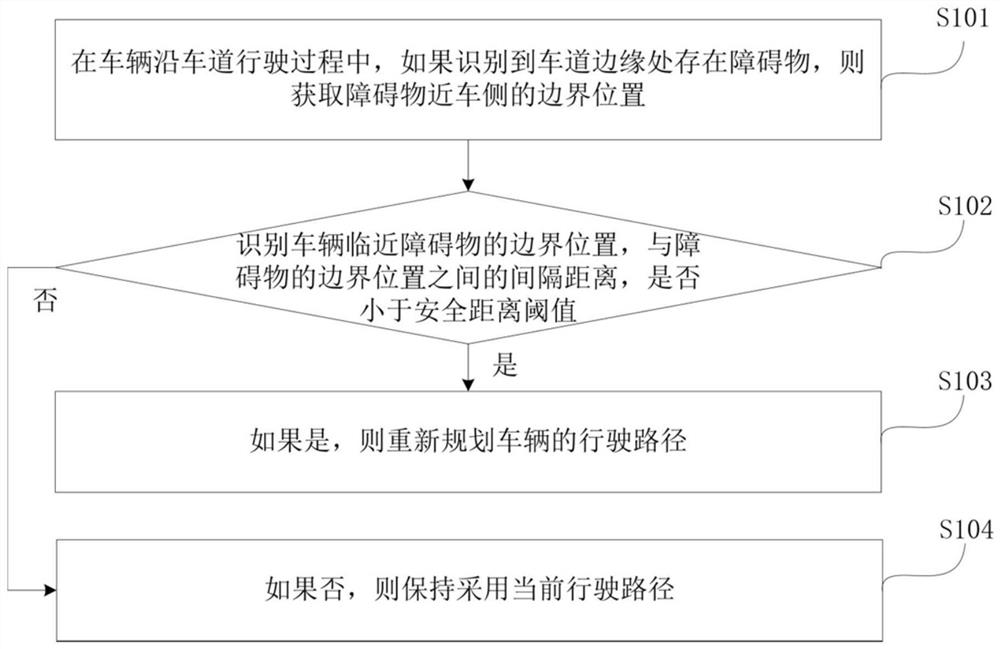
[0068] figure 1 It is a schematic flow chart of a vehicle control method based on obstacle recognition provided in Embodiment 1 of the present application. The embodiment of the present application can be applied to replanning the driving path of the vehicle according to the distance between the obstacle and the vehicle while the vehicle is driving In a scenario, the method can be executed by a vehicle control device based on obstacle recognition, which can be implemented by software and / or hardware, and can be integrated inside the electronic device. In this embodiment, the electronic device may be any hardware device with a data processing function, such as a vehicle-mounted computer, an intelligent driving instrument, and the like. The method specifically includes the following steps:
[0069] S101. When the vehicle is running along the lane, if it is recognized that there is an obstacle at the edge of the lane, acquire a boundary position of the obstacle near the vehicle....
Embodiment 2
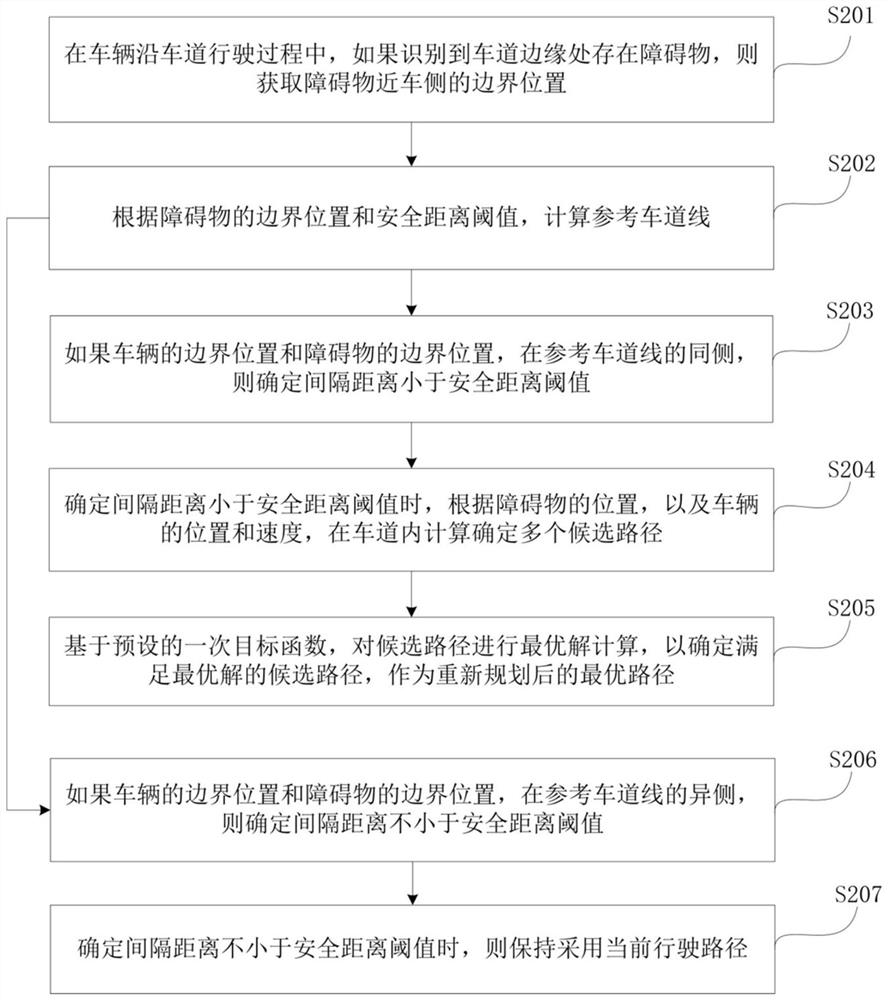
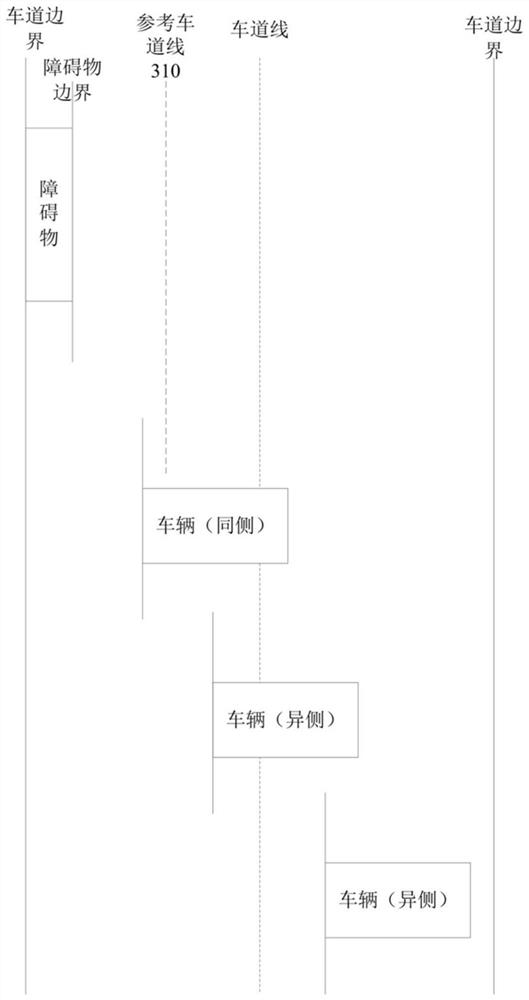
[0092] From the above analysis, it can be seen that in the embodiment of the present application, the driving path of the vehicle is re-planned by recognizing that the distance between the boundary position of the vehicle and the boundary position of the obstacle is less than the safety distance.
[0093] In a specific implementation process, identifying whether the vehicle is close to the boundary position of the obstacle, and whether the distance between the boundary position of the obstacle and the boundary position of the obstacle is less than a safety distance threshold includes: according to the boundary position of the obstacle and the The safety distance threshold is used to calculate the reference lane line; if the boundary position of the vehicle and the boundary position of the obstacle are on the same side of the reference lane line, it is determined that the separation distance is less than the safety distance threshold; if the If the boundary position of the vehic...
Embodiment 3
[0114] In order to achieve the above purpose, Embodiment 3 of the present application proposes a vehicle control device based on obstacle recognition. Figure 5 It is a schematic structural diagram of a vehicle control device based on obstacle recognition provided in Embodiment 3 of the present application.
[0115] Such as Figure 5 As shown, the vehicle control device based on obstacle recognition in the embodiment of the present application includes: an acquisition boundary position module 510 , an identification interval distance module 520 and a control module 530 .
[0116] Wherein, the acquiring boundary position module 510 is used for acquiring the boundary position of the vehicle near the side of the obstacle if it is recognized that there is an obstacle at the edge of the lane while the vehicle is running along the lane;
[0117] The identifying separation distance module 520 is used to identify whether the separation distance between the boundary position of the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More