

Local path planning algorithm based on membrane computing and particle swarm optimization
A local path planning and particle swarm optimization technology, applied in the field of robot navigation, can solve the problems of insufficient speed randomness, low accuracy, and low real-time performance, and achieve enhanced reliability and real-time performance, and the optimal speed is accurate and reliable Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further explained below in conjunction with the accompanying drawings.
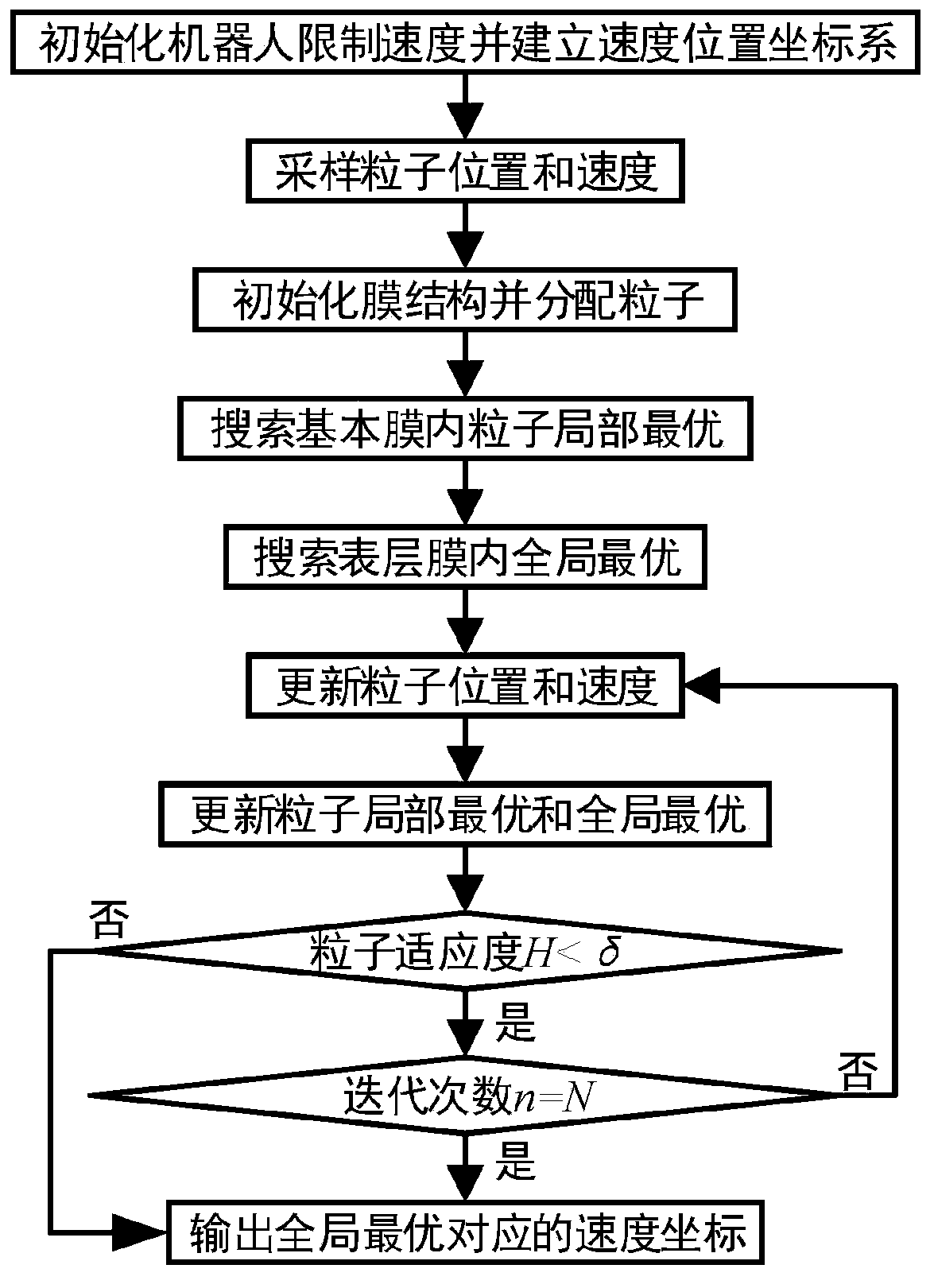
[0023] Such as figure 1 As shown, a local path planning algorithm based on membrane computing and particle swarm optimization includes the following steps:
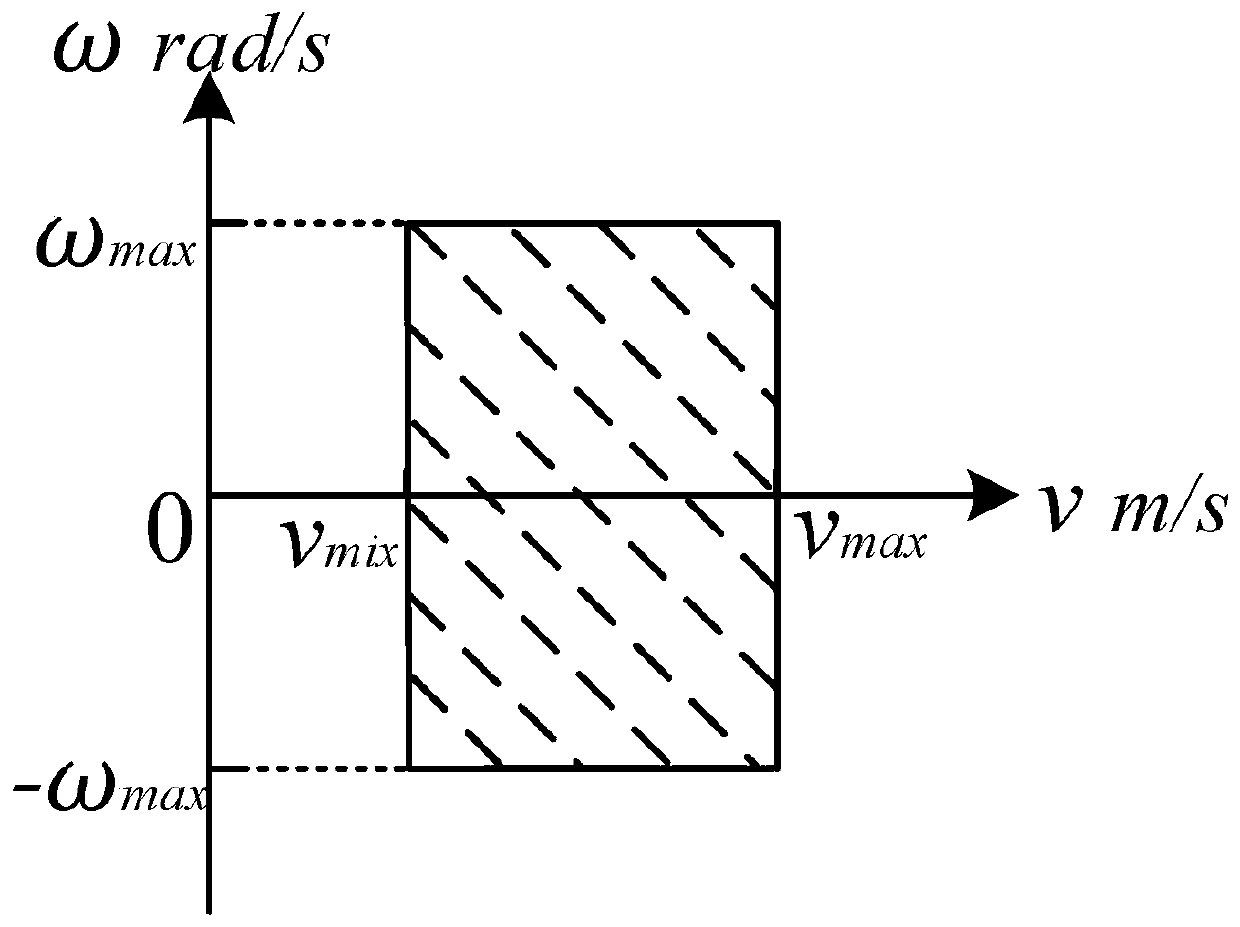
[0024] (1) Initialization, the robot processes the received obstacle position information sent by the sensor and the robot’s own speed limit range, and generates the reachable speed range of the robot’s safe driving at the next moment (v mix ,v max ) and (-ω max ,ω max ). Such as figure 2 As shown, a two-dimensional coordinate system is established with v and ω as the abscissa and ordinate, so as to reach the speed range (v mix ,v max ) and (-ω max ,ω max ) is the coordinate constraint, and the point in the shaded area of the coordinate system is the attainable speed of the robot for safe driving at the next moment;
[0025] (2) Sampling particles, select Q particles in the shadow area of the two-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More