

Modeling method for solving inverse solution of pneumatic soft robot based on KD tree algorithm
A modeling method and robot technology, applied in geometric CAD, design optimization/simulation, etc., can solve complex problems of soft robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0041] In this embodiment, the pneumatic soft bellows manipulator is taken as an example. The manipulator is mainly composed of three parts, an upper curved part, a lower curved part, and a gripper part. Among them, the upper and lower curved parts are only responsible for bending. The gripper part is responsible for grabbing objects at the target point.
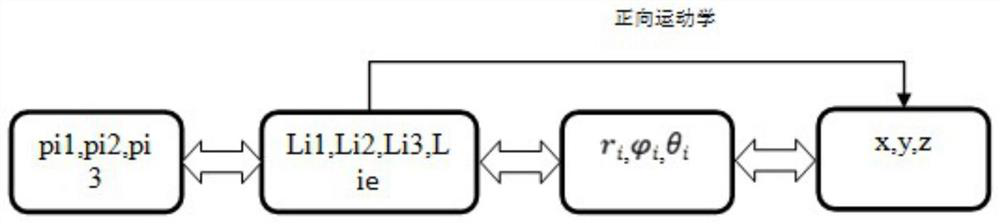
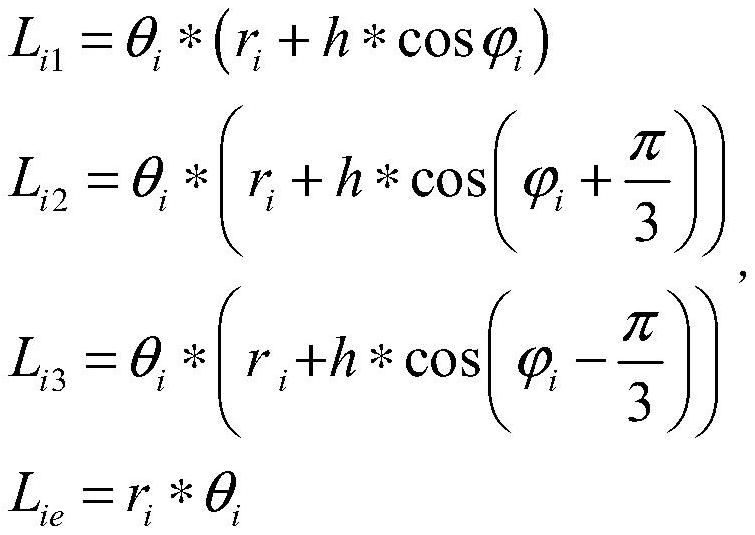
[0042] Step 1. Use the structure of the soft robot to establish a forward kinematics formula. According to the soft robot, the assumption of constant curvature and the shortest length are made, and the forward motion can be deduced by using the two mapping relationships of drive space, virtual joint space and work space learning formula;
[0043] The assumption based on the constant curvature model is that the curvature of the bending section is constant and the assumption of the shortest length. The assumption of the shortest length is that there is always a cavity in the bellows that maintains the maximum negative pressur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More