

Robot working platform for body position placing, traction, reduction and operation
A working platform and technology for surgery, applied in the field of robot working platforms, can solve the problems of limb fracture reduction and surgical blank, and achieve the effects of reducing surgical workload, simple installation and operation, and reducing equipment costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
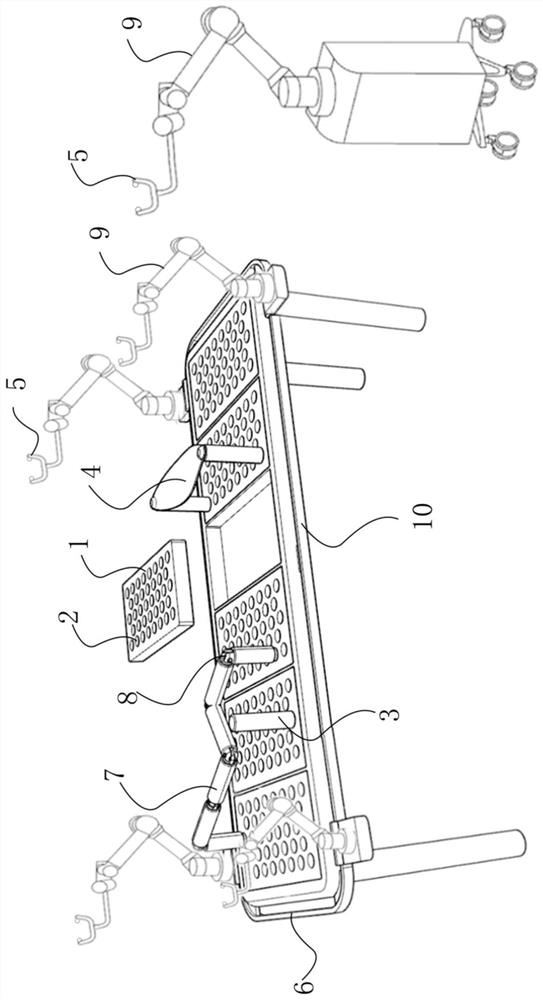
[0024] Example: such as Figure 1 As shown, a robot working platform for placing positioning, traction, rehabilitation and surgery, which comprises a flat panel 1, a fixed pile 3, a limb carrier 4, a traction bracket 5 and a track frame 6, a number of fixed holes 2 are provided on a flat panel of 50 × (30-200) cm, the spacing of the fixed hole 2 is set to 8-15 cm, the aperture of the fixed hole 2 is set to 3-6 cm, according to the needs of orthopedic surgery, a fixed pile for fixing the patient's body is inserted in the fixed hole 2, for support and / Or a limb bracket 4 of a fixed limb, in order to facilitate the locking of the fixed pile 2 and / or limb carrier 4, the fixing hole 2 is preferably designed as a square, hexagonal, plum-shaped or round, according to the patient's body type, the fixed pile 2 may be connected by a plurality of support units 7 by connecting joints 8 into a cylinder with a height of 10-50cm, a square cylinder, etc., the contact surface of the fixed pil...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Aperture | aaaaa | aaaaa |
| Spacing | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More