

Walking control system of scissor type aerial work platform
A high-altitude work platform, travel control technology, applied in the direction of brake actuators, servo motors, servo motor components, etc., can solve problems such as failure to brake on slopes, and achieve the effect of avoiding slopes, improving braking performance, and braking smoothly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0032] The core of the present invention is to provide a walking control system for a scissor-type aerial work platform, which can avoid the phenomenon that the scissor-type aerial work platform slips when driving and braking on a ramp.
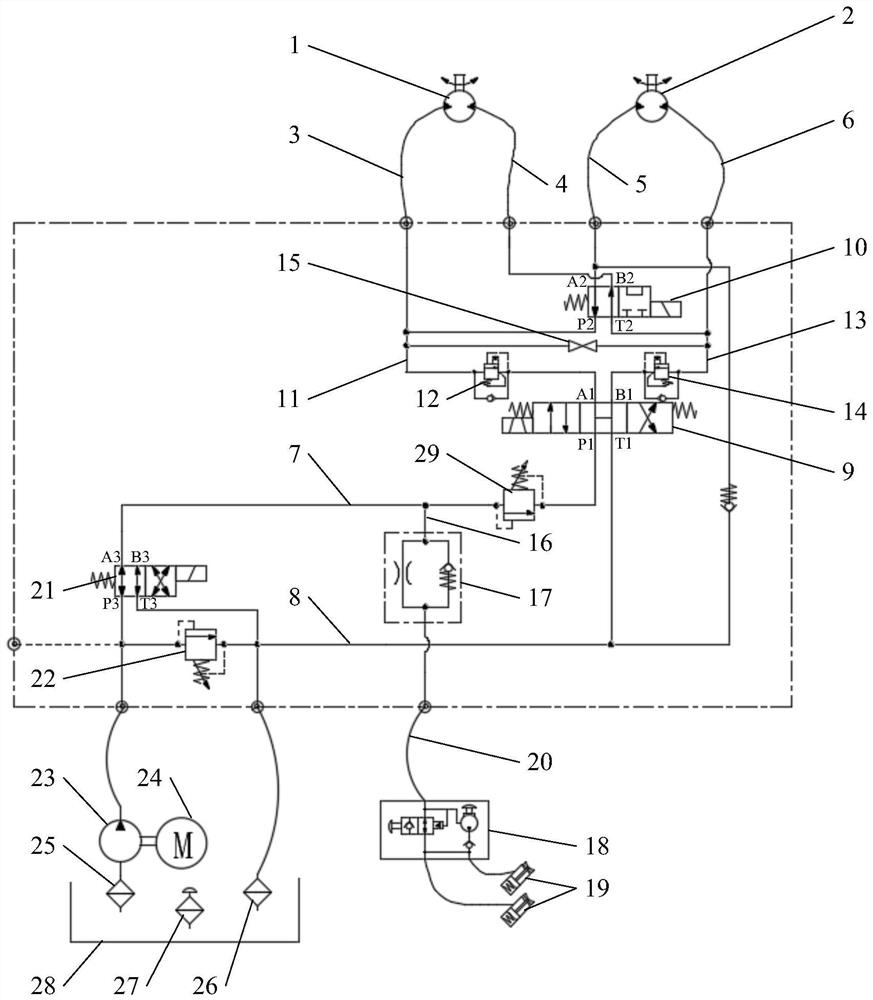
[0033] Please refer to figure 1 , is the control principle diagram of the scissor-type aerial work platform walking control system provided by the specific embodiment of the present invention.
[0034] The present invention ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More