

On-machine detection device for measuring aviation blade based on structured light and point cloud acquisition method
A technology for aviation blades and detection devices, which is applied to the point cloud acquisition of aviation blades on-machine detection devices, blade on-machine detection devices and point cloud acquisition fields, can solve the problem of reducing processing efficiency and yield, inability to guide blades online, and offline measurement Low efficiency and other problems, to achieve the effect of improving machining accuracy, avoiding secondary clamping errors, and improving production and testing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
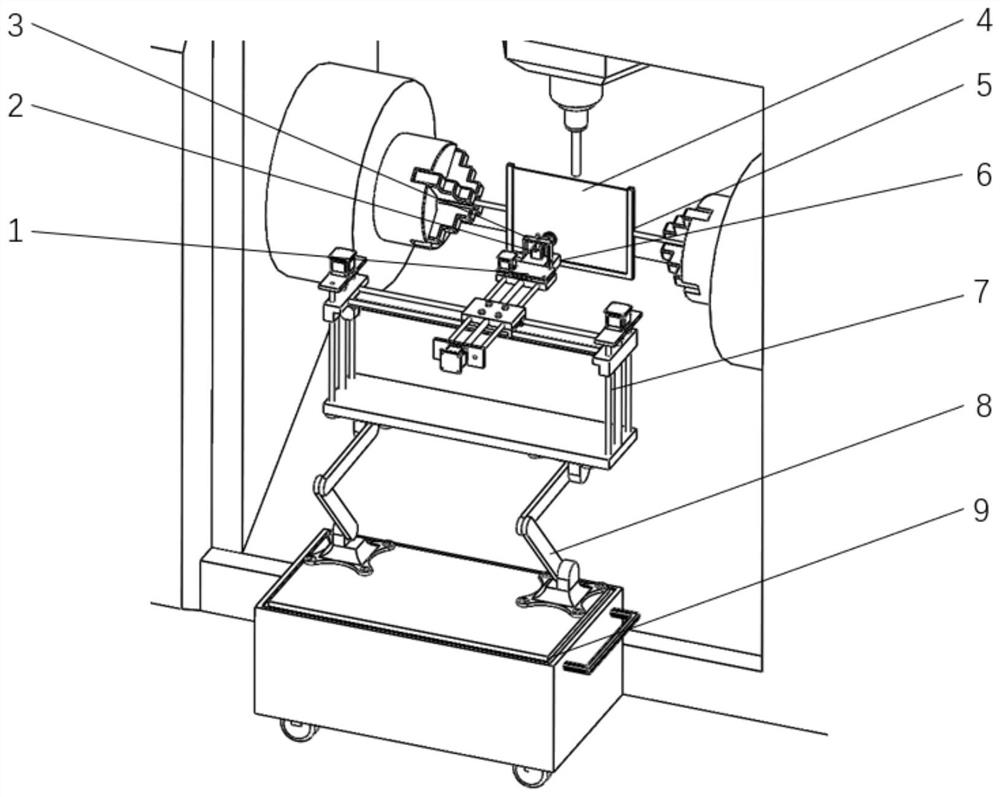
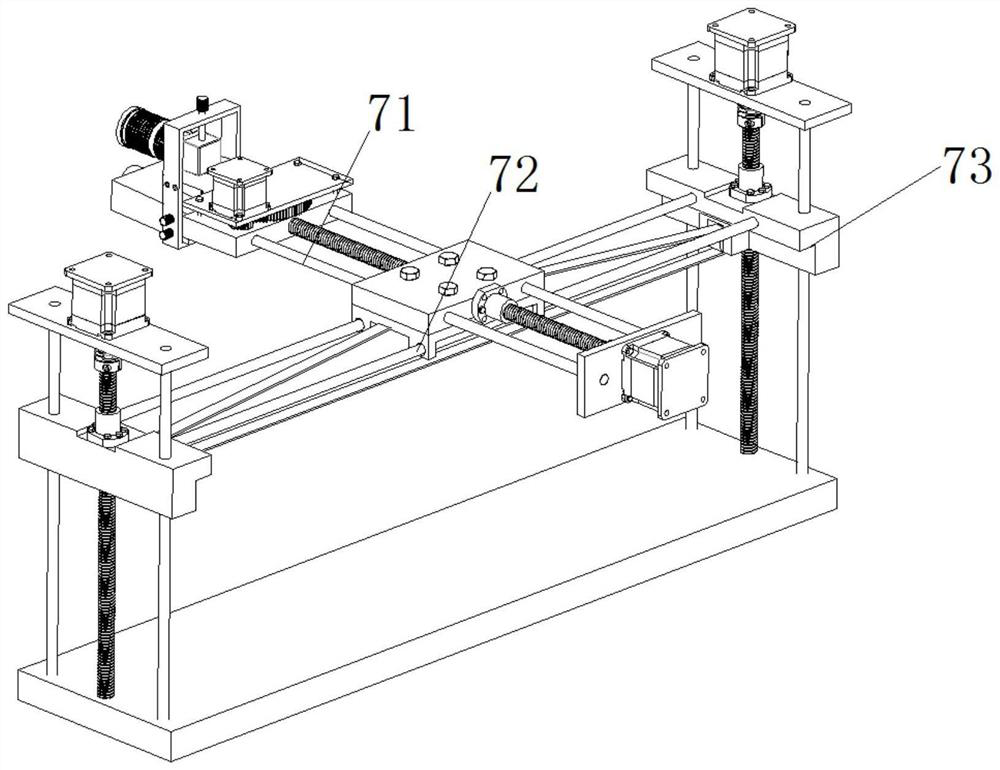
[0024] Specific implementation mode one: combine Figure 1-Figure 4 This embodiment is described. The on-board inspection device for aviation blades based on structured light measurement in this embodiment includes a terminal rotation mechanism 1, a CCD camera 2, a structured light system fixing device 3, a calibration plate 4, a calibration plate fixture 5, The projector 6, the three-axis motion mechanism 7 and the bottom support; the CCD camera 2 and the projector 6 are installed on the structured light system fixing device 3, and the structured light system fixing device 3 is installed on the end rotating mechanism 1, and the end rotating mechanism 1 It is fixedly connected with the three-axis motion mechanism 7, the three-axis motion mechanism 7 is installed on the bottom support, the calibration plate 4 is installed on the calibration plate fixture 5, and the calibration plate fixture 5 is installed on the machine tool chuck. The detection device provided in this embodime...
specific Embodiment approach 2
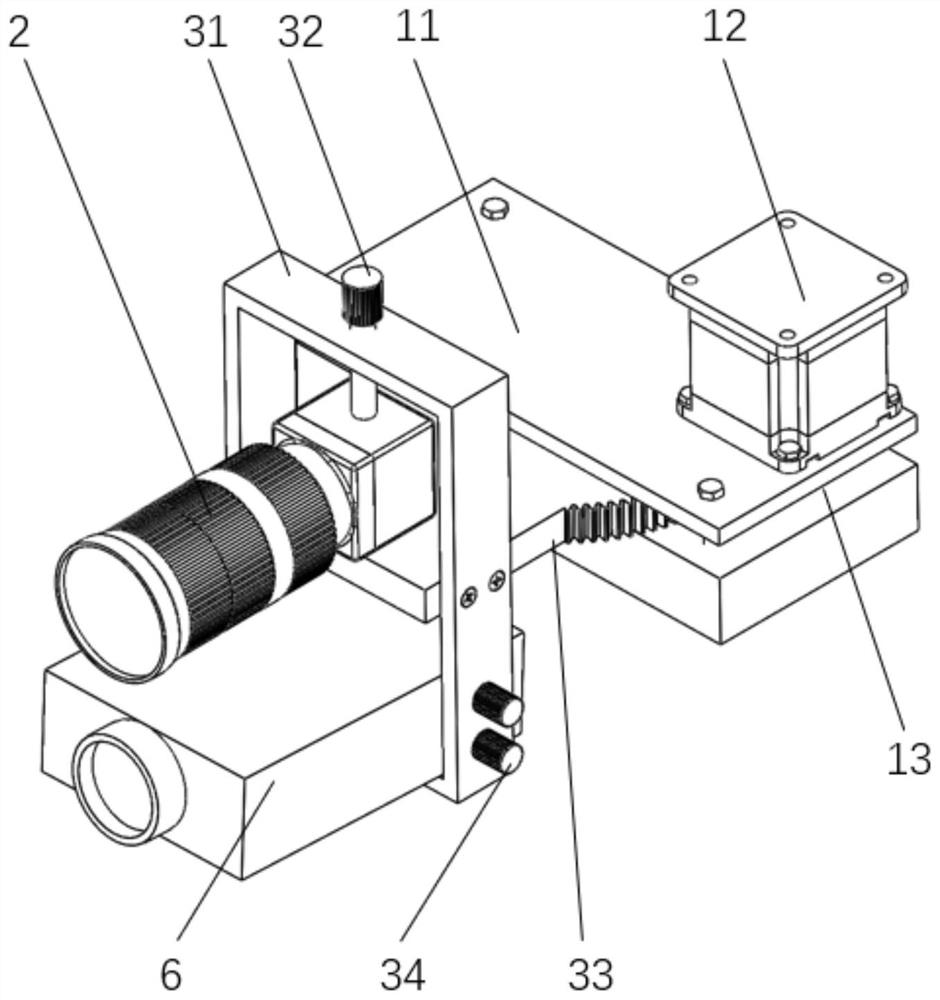
[0026] Specific implementation mode two: combination Figure 1-Figure 2 This embodiment is described. The on-board inspection device for aviation blades based on structured light measurement is given in this embodiment. The structured light system fixing device 3 includes an outer frame 31, a CCD camera locking bolt 32, an intermediate plate 33 and a plurality of projector locks. Tighten bolt 34; CCD camera 2 and projector 6 are installed on the external frame 31 from top to bottom, CCD camera 2 is installed on the external frame 31 by CCD camera locking bolt 32, and projector 6 is by a plurality of projector locking bolts 34 is fixedly installed on the outer frame 31, and one end of the middle plate 33 is fixedly installed on the outer frame 31 by screws, and the middle plate 33 is positioned in the middle of the CCD camera 2 and the projector 6, and the other end of the middle plate 33 is installed on the terminal rotation mechanism ( 1) on. The CCD camera 2 is installed on...
specific Embodiment approach 3
[0028] Specific implementation mode three: combination Figure 1-Figure 2 This embodiment is described. The on-board inspection device for aviation blades based on structured light measurement given in this embodiment, the terminal rotation mechanism 1 includes a stepping motor 12, a motor gear 13, and a fixed plate 11; the fixed plate 11 moves with three axes through bolts The mechanism 7 is fixedly connected, and the other end of the middle plate 33 is rotatably connected and installed on the fixed plate 11. The middle plate 33 installed on one end of the fixed plate 11 is an arc-shaped end plate, and the outer arc surface of the arc-shaped plate is processed with a plurality of teeth. Teeth, stepper motor 12 is installed on the fixed plate 11, and the output end of stepper motor 12 rotating shafts is fixedly set with motor gear 13, and motor gear 13 and middle plate 33 are processed with the arc-shaped end plate tooth engagement of tooth one end. The stepping motor 12 drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More