

Control method and device for excavator, processor and excavator
A control method and excavator technology, applied in the fields of devices, excavator control methods, processors, and excavators, can solve problems such as excavator overturning, jamming, and hidden dangers in safety control methods, so as to prevent overturning and ensure safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. It should be understood that the The specific implementation manners described are only used to illustrate and explain the embodiments of the present application, and are not used to limit the embodiments of the present application. Based on the embodiments in the present application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present application.
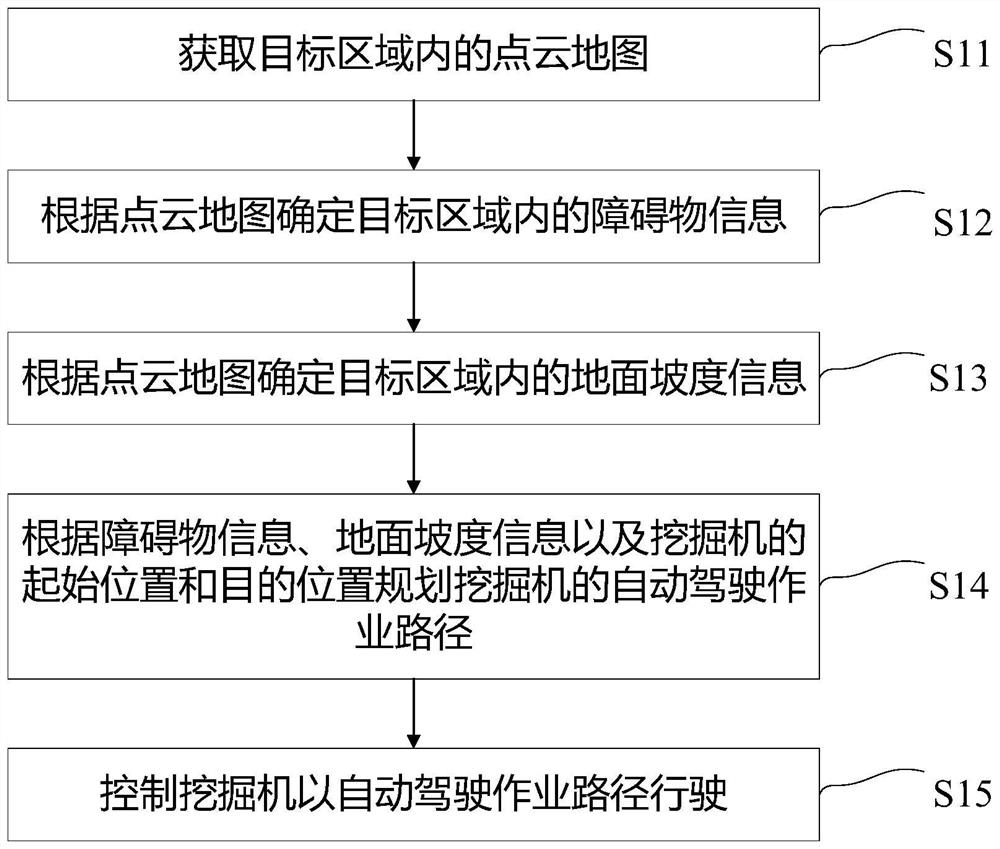
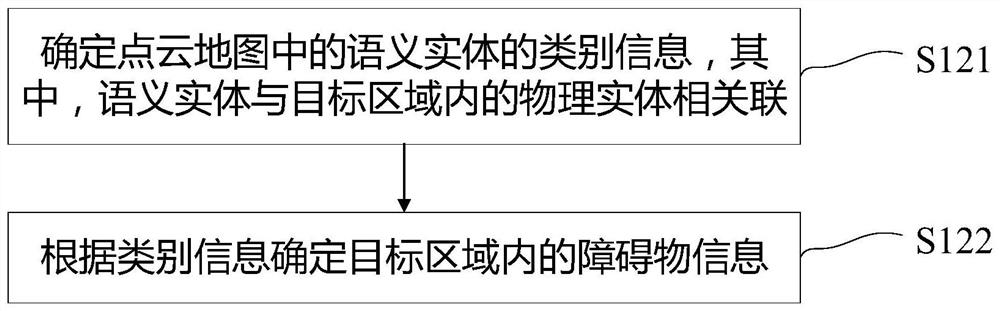
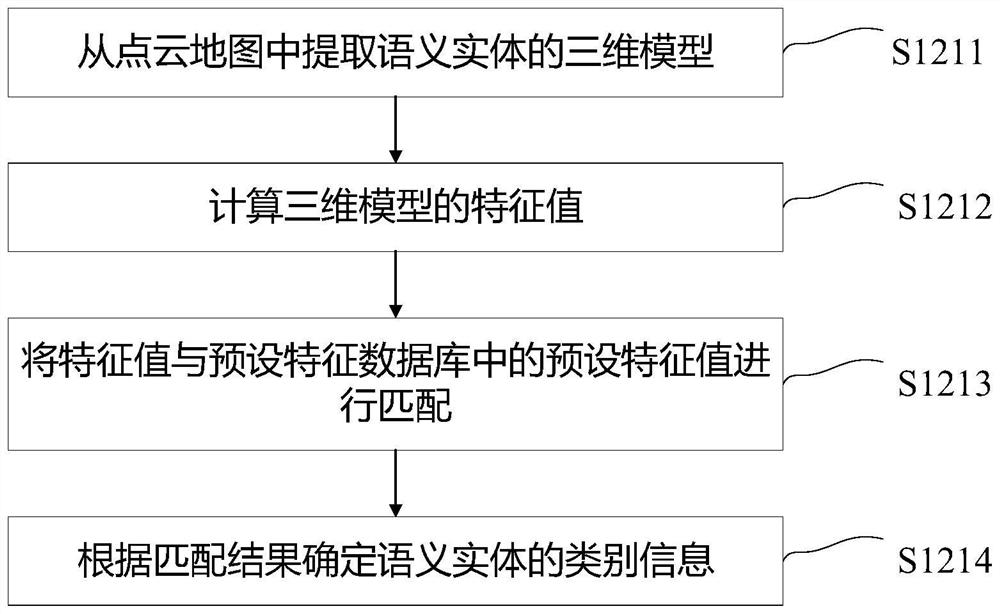
[0081] figure 1 It is a schematic flowchart of the control method for the excavator provided in the embodiment of the present application. Such as figure 1 As shown, in an embodiment of the present application, a co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More