

Robot obstacle avoidance device, obstacle avoidance control method and robot
A robot and obstacle avoidance technology, applied in two-dimensional position/channel control, vehicle position/route/height control, control/adjustment system, etc., can solve the problem of improving the effect of obstacle avoidance, lack of historical information and effective use of spatial information, etc. problem, to achieve the effect of improving obstacle avoidance effect, improving feature expression ability, and facilitating deployment and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
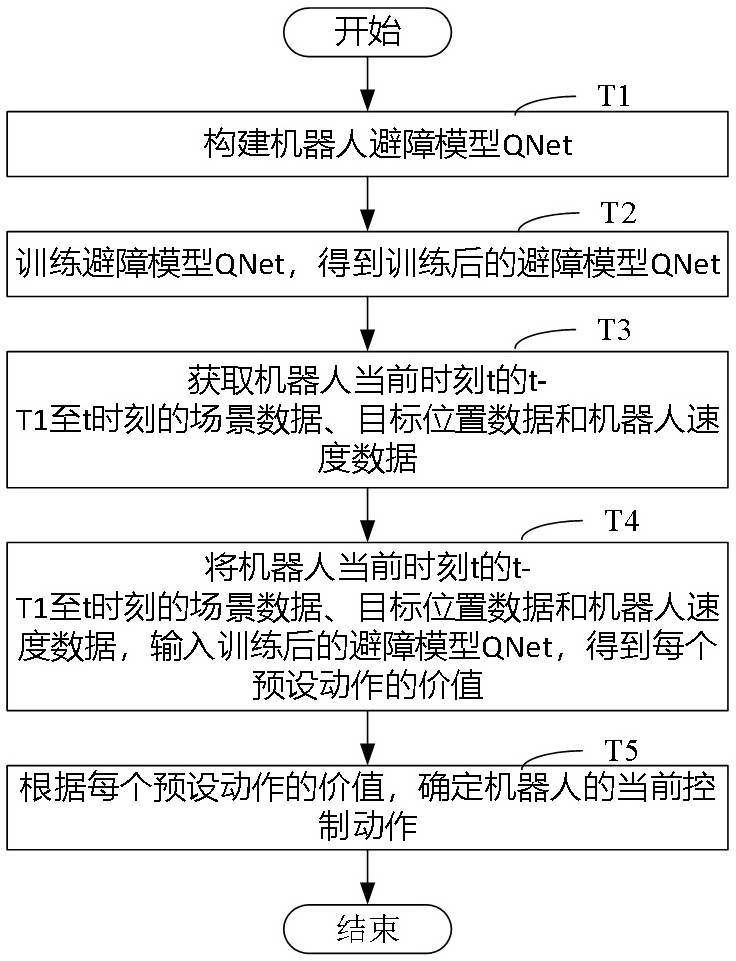
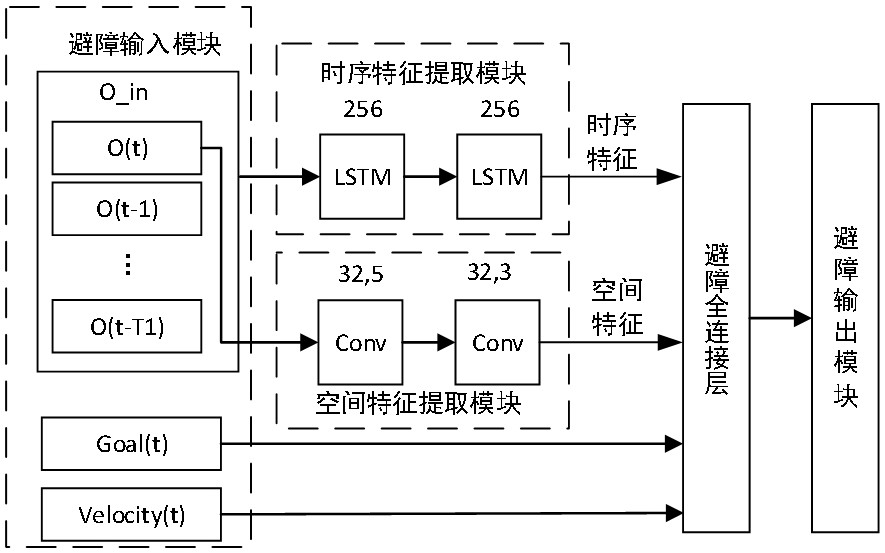
[0042] like figure 1 As shown, in order to improve the timeliness and accuracy of obstacle avoidance of the robot, the present invention first provides a robot obstacle avoidance device QNet, including:
[0043] 1: Obstacle avoidance input module, used to input the scene data, target position data and robot speed data from time t-T1 to time t of the robot (parameter t represents a certain current moment, T1 represents a positive number, and t-T1 represents the past a certain period of time, i.e. historical moment); preferably, for the input of the obstacle avoidance model, optional but not limited to the robot's state matrix state(t)=[O(t-T1)...O(t), Goal (t), Velocity(t)] characterization. Among them, O(t-T1)...O(t), representing the scene data of the robot from time t-T1 to time t (historical data from t-T1 to t and current data at current time t). Goal(t) =[Goal_x(t), Goal_y(t)], representing the position data of the target relative to the robot (optional but not limited...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More