Information reconnaissance robot for blowout out-of-control environment of oil and gas well
A technology of robots and oil and gas wells, applied in wellbore/well components, measurement, construction, etc., to achieve the effects of rapid information transmission, improved safety, and reduced frequency of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
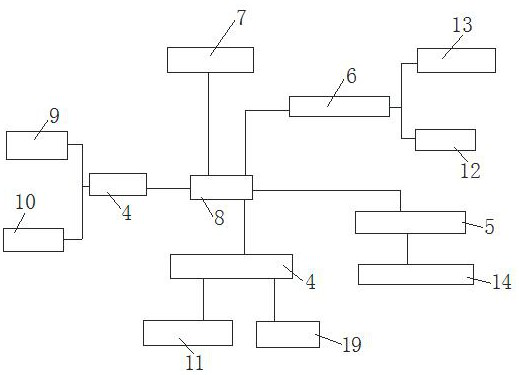
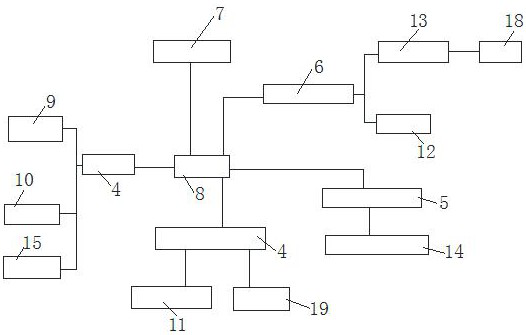
[0055] In this embodiment, the lens of the visible light camera 9 and the infrared thermal imager 10 is also controlled and connected to the controller 8, and receives instructions sent by the controller 8 to realize the adjustment of the horizontal angle and the vertical angle of the lens. The visible light camera 9 The horizontal angle adjustment range of the lens of the infrared thermal imager 10 is 0°-360°, and the vertical angle adjustment range is -90°-+90°.
[0056] In this embodiment, the image acquisition module 3 also includes a lens cleaning mechanism 15, which is used to clean the lenses of the visible light camera 9 and the infrared thermal imager 10, so as to ensure the accuracy of the collected images in an emergency environment with water mist. Clarity meets requirements.
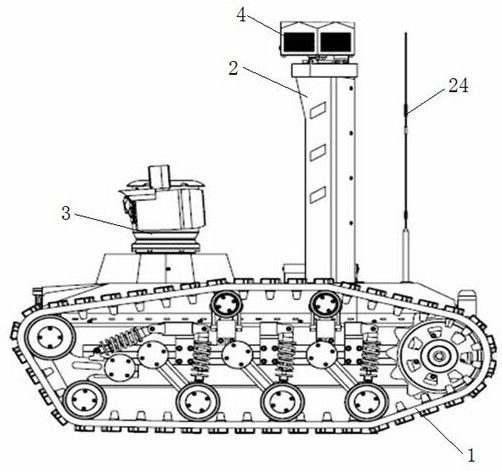
[0057] In this embodiment, the walking device 1 adopts a crawler structure, refer to Figure 3-6 The surface layer of the crawler chassis of the walking device 1 is made of high-temperature...
Embodiment 2
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com