

Monocular distance measurement method and system, electronic device and storage medium
A technology of monocular distance measurement and binocular distance measurement, which is applied in image analysis, image enhancement, instruments, etc., can solve the problems of low accuracy and high production cost of inserting vehicles, and achieve low accuracy and improve production efficiency and grasping accuracy, cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
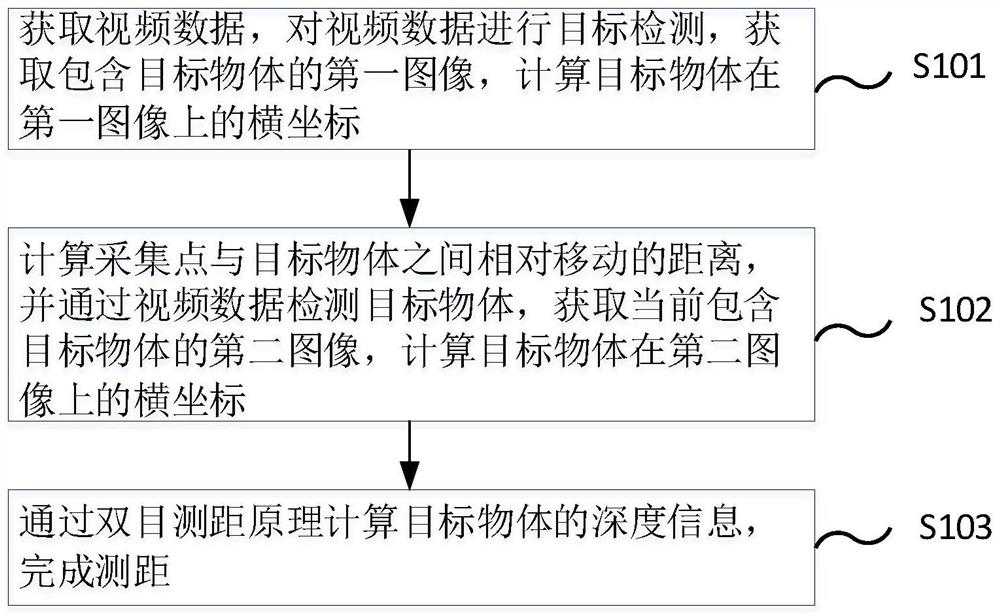
[0048] Embodiment 1: Taking the current collection point position as the reference point, the intelligent robot equipped with the camera moves at the speed v for t time, then the distance B=v*t that the intelligent robot moves can be calculated; then the video data collected by the camera detects Search for the target object D, if the target object D is detected, then obtain and store the second image C that currently contains the target object D, and calculate the abscissa Xc of the target object D on the second image C; If no target object D is detected, the camera continues to collect video data, and performs target detection on the collected video data.
Embodiment 2
[0049] In the second embodiment, in addition to the movement of the intelligent robot, the robot can also be kept still, and only the camera can be moved. For example, taking the current collection point position as the reference point, the camera is translated at a speed v for t time, and the distance B = v*t. Then, the target object D is detected and searched through the video data collected by the camera. If the target object D is detected, the second image C that currently contains the target object D is acquired and stored, and the horizontal direction of the target object D on the second image C is calculated at the same time. Coordinate Xc; on the contrary, if the target object D is not detected in the video data, the camera continues to collect video data, and performs target detection on the collected video data. The adoption of this solution enables the intelligent robot to smoothly collect video data including target objects in a small field without moving, thus exp...
Embodiment 3
[0051] Embodiment 3, if the collection point does not move and the target object moves in this embodiment, the motion information of the target object D needs to be obtained first, and the distance B that the collection point moves relative to the target object D is calculated through the motion information, and then the camera is used to collect the motion information. The received video data detects and searches for the target object D. If the target object D is detected, the second image C that currently contains the target object D is obtained and stored, and the abscissa Xc of the target object D on the second image C is calculated simultaneously; , if the target object D is not detected in the video data, the camera continues to collect video data, and performs target detection on the collected video data.
[0052] In step S103, the depth information of the target object is calculated through the binocular ranging principle to complete the ranging.
[0053] Preferably, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More